Article
citation information:
Uddin,
Z., Dindar, S. A drone-integrated safety framework for sustainable rail infrastructure
management and accident prevention. Scientific
Journal of Silesian University of Technology. Series Transport. 2026, 130, 235-256. ISSN: 0209-3324. DOI: https://doi.org/10.20858/sjsutst.2026.130.14
Zia UDDIN[1],
Serdar DINDAR[2]
A DRONE-INTEGRATED
SAFETY FRAMEWORK FOR SUSTAINABLE RAIL INFRASTRUCTURE MANAGEMENT AND ACCIDENT
PREVENTION
Summary. The rail accident
statistical data highlights the core reasons related to structural safety are
ageing, high-density network, infrastructure defect, environmental hazard and
human error. This study proposes a socio-technical architecture pivoting around
UAVs within an intelligent transport ecosystem. A three-pillar framework
is introduced, consisting of Monitoring, Analysis and Decision-Making, and
Response and Mitigation. Data from multiple sources and different sensor types
are utilized in machine-actionable safety intervention. Scenario-based
assessments demonstrate the framework's impact. The proposed approach offers
quantifiable benefits, such as reconnaissance flights adjusting early warning
thresholds according to operational context, optimizing field deployment and
resource allocation. This guide intends to achieve two primary objectives:
firstly, to meaningfully reduce the risk of accidents; and secondly, to support
sustainable mobility goals. Additionally, the framework is intended to align
with evolving aviation and data governance standards.
Keywords: Drone-Integrated Framework, AI-Driven Rail Inspection, Intelligent
Transportation Systems, Multi-sensor Data Fusion, Sustainable Rail
Infrastructure
1. INTRODUCTION
Although
railway networks remain critical for the global transport system, concerns
about accident records and the measures taken in response to accidents are
difficult to ignore and preoccupy transport engineers
The
conceptual contributions of this manuscript are three: first, conceptualizing
UAVs as a meta- sentinel observer, central to the railway safety ecosystem;
second, the synthesis of knowledge from material science, AI, control systems,
and sustainability studies; and third, the integration of rapid detection
alongside probabilistic reasoning, that sets off automatic execution
mechanisms, packed into a coherent architecture that can be operationally
deployed by railway operators. The research aims to advance the state of
knowledge in respect of UAV-supported infrastructure management and lay out a
clear strategic direction toward reducing service disruptions and associated
human and environmental costs.
2. BACKGROUND AND LITERATURE REVIEW
Maintenance
is an ongoing challenge for ageing infrastructure under growing traffic demands
Defects
such as fractured rails and track misalignments continue to rank among the
leading causes of derailments, suggesting that inspection and maintenance
practices may require greater stringency and consistency
Digital
developments in sustainability have begun to reshape the manner in which these
challenges are addressed
A
plethora of technological advancements have demonstrated considerable potential
in enhancing safety and reliability
While
current applications of drones in railway infrastructure offer some favorable evidence, persistent gaps in research and
on-the-ground practice endure
However,
a thorough investigation has revealed a number of research gaps and identified
several challenges. While drones have primarily been used for surface-level
activities such as inspection and data collection in rail infrastructure, their
use in accident prevention systems is still in its infancy. Most drones in rail
infrastructure are supplementary, meaning they are used to aid maintenance
activities rather than accident-avoidance systems. The literature indicates
that the development of drones in rail infrastructure is still in its early
stages. There are still many questions to be answered about their use, such as
the most effective way to utilize them, how to integrate them with rail
infrastructure systems, and the technical and regulatory hurdles involved, all
of which will be discussed in subsequent sections.
Although
pilot tests have demonstrated promising results, there are still research gaps
to be filled. The use of drones in the railway system is limited in scope, with
most applications currently being used as supplementary tools rather than as an
integral part of the system. Fundamental challenges hinder the system's
scalability in terms of optimal deployment strategies, smooth integration for
data purposes and legal implications. Therefore, improved operational safety
through the integration of drone technology can prevent rail accidents, reduce
fatalities, and prevent environmental degradation (related to fire and
hazardous spills), aligning with sustainable development principles
3. DRONE TECHNOLOGY AND ITS APPLICATIONS IN RAIL
INFRASTRUCTURE
Drones
equipped with sophisticated technology (HD-optical, LiDAR, and thermal cameras)
are more likely to increase the complexity and accuracy of rail structure
observation tasks, sufficiently performing them even in challenging
environments
One
specific example is autonomous track inspection, where both rotary and
fixed-wing drones are used to optically survey the rail corridor for short- and
long-range capabilities. This data, it is claimed, is said to provide good
results when passed through CNNs for identifying defects such as cracks, absent
bolts, and even minor misalignments
Studies
have explored post-landslide debris assessment, where UAVs can be used to
evaluate debris on tracks
UAVs
offer quick deployment in difficult-to-reach areas such as bridges, cuttings,
tunnels, adjacent geomorphologies, and unsafe areas. Allowing for observation
from an elevated position for a system-wide perspective that aids in the early
detection of cracks, loose fasteners, ballast movement, foreign objects, and
structural anomalies. The integration of the HD imaging capability and AI
technology for anomaly detection has the potential to revolutionize the inspection
process from traditional to systematic and scientific through predictive
maintenance and situational interventions. The research and field results
suggest a positive outlook for aerial inspections. They pose minimal personnel
risks and track closures while ensuring accuracy through quick deployment and
agility.
From
current literature and practice, it is evident that because of the flexibility
and awareness that drones possess, they have the potential to be applied for
structural health monitoring. The data collection capabilities of drones
are superior, and when combined with ML tools, the process of monitoring
is further improved.
4. DEVELOPMENT OF CONCEPTUAL FRAMEWORK FOR DRONE-BASED
ACCIDENT PREVENTION
The
capabilities and research gaps discussed in Section 3
provide the basis for the proposed framework. This function is executed within
the socio-technical safety ecosystem discussed in Sections 5
and 7.
Fig. 1. Drone-centered framework for railway accident prevention via
monitoring, analytics, and rapid mitigation
As
shown in Fig. 1, the framework comprises three interrelated pillars: (i) monitoring; (ii) analysis and decision-making; and (iii)
response and mitigation. These three components provide an end-to-end process
for addressing the identified potential hazards. Although drones have proven
effective in rail inspection activities, integrating the technology into
real-time rail accident prevention is still a work in progress
4.1. Monitoring
Monitoring is the primary interface of this framework: it
combines real-time multi-sensor feeds to display an updated picture of the
state of the corridor. The monitoring interface allows for the upgrading of the
inspection system from a simple periodic inspection system to an adaptive
inspection system. The inspection system is also made situation-aware with the
help of multi-sensor UAVs.
The inspection provided by these UAVs is appropriate for
areas that are difficult to reach, like bridges, cuttings, and tunnels. The
multi-sensor inspection capability provided by UAVs helps in improving the
situation awareness while also providing security for the infrastructure and
the environment. The multi-sensor capability and mobility offer an improved
view of the situation while protecting the infrastructure and the environment
simultaneously
The proposed surveillance approach integrates onboard,
trackside and aerial data, advancing current methodologies by positioning
drones centrally. This enables the simultaneous detection of hazards,
estimation of risk, and support of crews against unforeseen dangers
4.2.
Analysis & Decision-Making
Developing
upon the monitoring architecture (Section 4.1),
this layer functions as the cognitive core of the framework, meanwhile, the AI
transforms multi-source monitoring inputs into structured safety actions. This
layer combines anomaly detection with probabilistic reasoning within the bounds
of rule-based logic, as shown in Fig. 2
(Decision Support System (DSS)).
The primary
processing is done through automated anomaly-detection algorithms applied to
imagery, LiDAR scans, and trackside data streams, identifying deviations from
expected infrastructure or environmental states (described in Section 5).
The second layer of anomaly detection is through thermal scans. If both the
first and second layers in the pipeline approve, the data is further processed
in the third layer (maintenance comparison), and a decision is then made (as
shown in Fig. 2).
Multi-source
data fusion improves detection reliability by allowing cross-validation (of
signals) across modalities. Confirmed anomalies are forwarded to a higher-level
inference engine (layer 2 and layer 3), where contextual risk evaluation is
performed.
A Bayesian
network model helps in the implementation and forming the probabilistic
backbone of the reasoning process
Fig. 2. DSS- A
three-tier decision framework integrates Bayesian predictive reasoning and
fuzzy inference for an accident type
As
illustrated in Fig. 2,
complementing probabilistic inference, the DSS will also be incorporated with
an expert system component that is a rule-based AI-imbued with step-by-step
decision-making protocols. These protocols will be synthesized using
operational knowledge through structured IF–THEN logic (illustrated in Fig.
2);
and they would be derived from engineering standards and field expertise with
predefined safety thresholds that trigger appropriate escalation pathway(s).
After
quantifying risk levels, the optimization mechanisms guide the selection of
intervention strategies. Model Predictive Control (MPC) techniques evaluate
feasible response alternatives under a set of operational constraints. The
constraints can be multiple as follows: Location-specific- braking distances,
traffic density, and infrastructure availability, plus scenario-specific speed
restrictions, rerouting, or drone redeployment. These specifications can ensure
safety action proportionality and system awareness working in tandem.
A critical decision may not be left to an automated system; instead, it
is routed to a human reviewer, moreover a human reviewer is kept at the center
as a final approver, either in the loop or of the loop. The errors occurred due
to an overconfident automation that could be mitigated by this human operator
in the decision command. It will build trust among the organization(s) and the
new introduced system. This will further help in designing the system for
reducing further imperfections. Taken together, the Analysis and
Decision-Making pillar turns raw sensor inputs into actions by combining
multi-sensor fusion, probabilistic risk assessment, and rule-based reasoning.
The system not only detects potential accidents; it also judges when and how to
intervene, approximating the judgement of experienced rail operators while
drawing on the speed and consistency of AI.
4.3.
Response & Mitigation
The
monitoring and analysis & decision-making layer (Sections 4.1 and
4.2)
establishes hazard detection and evaluation, and this layer (illustrated in Fig. 3) validates the risks and a
proportionate response (interventions across signaling systems, train control
mechanisms, and field operations). This design choice seems deliberate and
arguably more realistic for operational adoption. An IoT-enabled communication
framework keeps detection, decision, and execution synchronized in near
real-time. The interval between hazard emergence and protective action may
therefore be narrowed considerably. Human supervisory authority is preserved
throughout this process. The following paragraphs explain the response and
mitigation phase:
Automated
Train Control Integration: When risk thresholds defined by the
DSS are exceeded, intervention commands are transmitted to signaling and
Positive Train Control (PTC) systems. These commands may dictate speed,
braking, or block signal adjustments under operational constraints defined in
Section 4.2.
Working closely with existing train control infrastructure reassures that
mitigation is immediate yet bounded within established safety protocols.
IoT-Based
Communication and Coordination: The cloud layer in Fig. 3 represents IoT edge processing
architecture like those being trialed in industry (linking drones, trackside
sensors, trains, and control centers). Hazard information is transmitted with
geospatial tagging, reinforced with confidence levels and enabling coordinated
decision execution. Hence, holding consistency between analytical &
decision output, and operational commands.
Drone-Assisted
Tactical Response: Drones can offer many duties and are not
limited to just detection tasks. Once a hazard is flagged, they can be
redirected to provide secondary visual confirmation or track mobile threats
along the corridor. In areas where GNSS signals are degraded or blocked, drones
may also serve as communication relays between field assets and control
centers. This flexible nature of a UAV expands the capabilities of the system's
situational awareness.
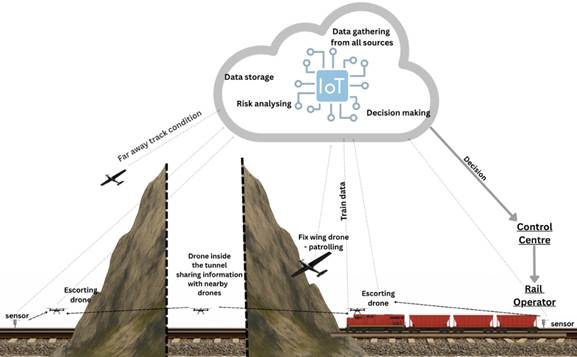
Fig. 3.
Drone‑integrated response & mitigation architecture
Network-Level
Optimization and Traffic Management: Situations
where the decision needs to be optimized on the system level rather than a
single train-related; for example, in case of an accident, overriding old
schedules with new ones and managing the existing trains on the network. Thus,
the whole system would require working in conjunction: The DSS will help and
correspond to individual decision-making, and IoT will collaborate at a network
level.
Human
Supervisory Oversight: As Fig. 3 illustrates, the feedback loop to operators is also
emphasized. Despite the automation of numerous procedural elements, human
operators may be held responsible for the final approval of critical
interventions, particularly those requiring high-risk compromises, as
emphasized in the first point.
Feedback and
System Learning: Feedback loops have been shown to facilitate
continuous improvement (Bayesian integration). After each incident, sensor logs
and videos are analyzed with a view to improving detection algorithms,
adjusting drone deployment rules, and updating maintenance schedules.
In summary,
the Response & Mitigation phase is the stage at which the information
generated in the preceding stages of the framework is implemented. The
integration of sensors, drones, and human decision-makers through an
IoT-enabled platform facilitates the transformation of hazard detection into
targeted and timely interventions. The integration of automated decision-making
processes, the deployment of drone first responders, and the implementation of
human oversight will form a practical and forward-looking accident prevention
approach that addresses the speed and accuracy required for contemporary
railway safety.
5. CASE SCENARIOS AND POTENTIAL APPLICATIONS
To demonstrate the effectiveness of a drone-based accident prevention
system, several hypothetical (but plausible) scenarios are considered in which
drone intervention averts potential railway accidents. These scenarios
illustrate how the components of our framework work in concert:
5.1.
Scenario 1: Natural Hazard Monitoring
A severe thunderstorm across a mountainous rail corridor triggers
landslips and dislodges debris. As „post-storm sweep” protocol automatically launches drones to reconnoiter predefined
high-risk segments before the first morning train. Drone A, (with LiDAR and a
high-intensity spotlight) approaches a blind curve and detects an anomalous
obstruction on the rails. The image-classification confirms it is a large rock
fragment straddling both rails. Live video, high-resolution point-cloud
geometry, and precise GPS coordinates are streamed to the control center. A
freight train, 10~km upstream, is automatically issued a Positive Train Control
(PTC) slow order. Maintenance staff receive the drone imagery and deploy with
hydraulic breakers to clear the rock before traffic resumes. By converting
rapid aerial confirmation into an immediate speed restriction- and a precisely
targeted maintenance dispatch- the system prevents a derailment and minimizes
service disruption, illustrating the platform's ability to handle any
post-storm obstacle, whether rock, fallen tree or washed-in debris. Fig. 4 illustrates
this scenario briefly.
5.2. Scenario 2: High-Profile Grade Crossing
Monitoring
At a highway-rail grade crossing known for its steep profile („hump” crossing), a low-bed truck gets stuck on the rails
while trying to cross. Such situations are extremely dangerous, as exemplified
by the 2017 Biloxi accident, where a bus was hit by a train after getting
lodged on a hump crossing
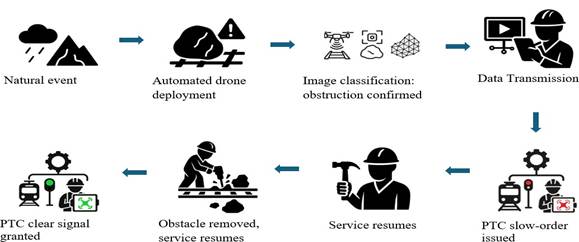
Fig. 4. Scenario 1:
Drone-enabled rapid response to natural hazard events on railways
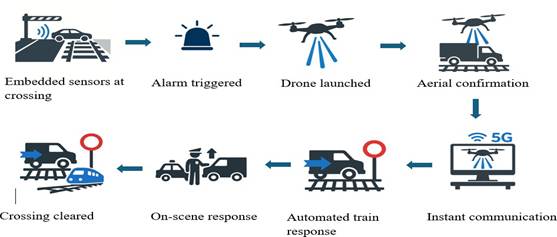
Fig. 5. Scenario 2:
Rapid drone-assisted hazard verification at high-risk grade crossings
5.3.
Scenario 3: Track Integrity and Heat Stress
During a summer heatwave, rail tracks are subject to thermal expansion.
Surveillance is scheduled on a section of high-speed track known to experience
sun kinks (buckling) in extreme heat. One afternoon, a drone equipped with both
a high-resolution camera and a thermal sensor fly over the section, and the
data is processed by an AI-enabled anomaly detector to classify the anomaly as
a developing buckle. The DSS imposes a speed reduction order and dispatches the
maintenance crew before failure occurs. Here, the scenario shows how the
proposed architecture can contribute to preventive maintenance actions. Fig. 6 illustrates
this scenario briefly.
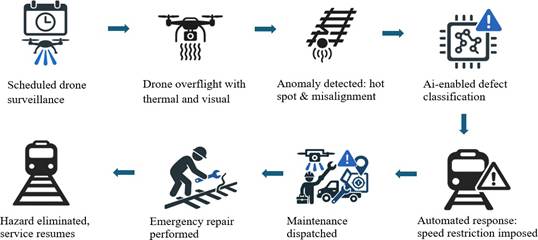
Fig. 6. Scenario 3:
Drone-enabled detection and mitigation of heat-induced track buckling
5.4. Scenario 4: Bridge Structural Safety
A freight railroad operates a 100-year-old steel truss bridge. Regular
inspections are done, but issues can arise between inspection intervals. A
drone is assigned to do a detailed photogrammetry survey of the bridge every
week. During a routine survey flight, an image is captured showing a new crack
in a critical gusset plate beam: comparative analysis flags deviation from the
baseline conditions. Experts review the situation and temporarily suspend
service for repair. Here, UAV-enabled structural health monitoring functions as
an aerial non-destructive testing tool, preventing infrastructure failure and
potential derailment (Fig. 7).
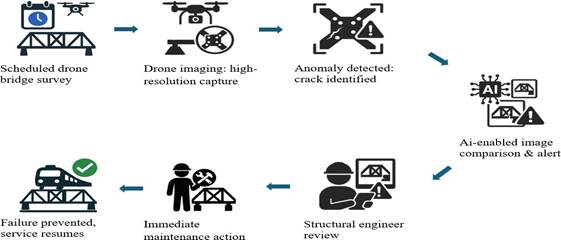
Fig. 7. Scenario 4:
Drone-based structural monitoring averts bridge failure
5.5. Scenario 5: Trespasser and Wildlife
Detection
Along a lightly trafficked 20-km rural corridor bounded by pastureland
and a protected forest, the railway company installs a string of low-power,
AI-enhanced stereo-camera and passive-infrared nodes at statistically confirmed
„hot spots” where wildlife herds or local
walkers habitually stray onto the track. The edge-enabled stereo sensors detect
prolonged track intrusion, which triggers the dispatch of an aerial vehicle.
When the presence of a trespasser or wildlife is confirmed through optical and
thermal imaging, the DSS imposes a speed restriction while a response team is
dispatched as shown in Fig. 8. Incident data feed back into
hotspot refinement and preventive measures.
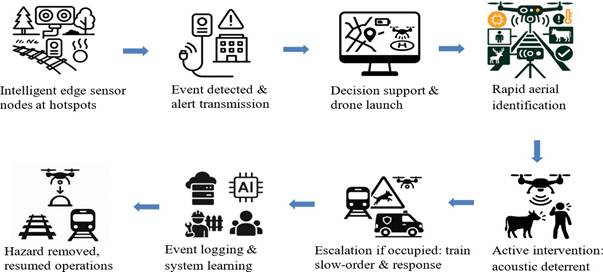
Fig. 8. Scenario 5:
Autonomous drone response to trespasser
and wildlife detection along rural corridors
These
scenarios, while hypothetical, draw on real challenges and the capabilities
that drone systems can deliver. The defining theme in each scenario is the
early-detection capability and advanced maneuverability; these are the primary
upgrades possible due to UAV integration, coupled with the architectural
upgrades (real-time data transmission, and structured decision logic),
providing a framework for how where detection-to-action latency can be
significantly reduced. Beyond the five primary examples, drone-supported
monitoring may also assist in hazardous material assessment, wildfire
detection, snow clearance verification, and post-disaster reconnaissance. In
such contexts, UAVs extend the operator’s situational awareness while
minimizing human exposure to risk.
These
scenarios emphasize the advantage an airborne AI-infused structural health
monitoring system could provide. The proposed drone-integrated safety framework
supports a shift from periodic inspection toward anticipatory safety
management.
6.
DISCUSSION
ON CHALLENGES, LIMITATIONS, AND ETHICAL CONSIDERATIONS
Although the
advancements in aerial and AI technology give a very positive outlook, making
this integration of drones with railway safety monitoring possible remains
constrained due to multiple interdependent reasons: technical, regulatory,
organizational, and ethical factors. The conceptual framework laid out in
Section 4 must operate within the socio-technical environment limitations
(engineering reliability, governance structures, operational culture, and
public trust).
Table
1 summarizes these challenges into five domains.
These domains are interdependent; for example, due to limited endurance, the
risk exposure increases and makes the regulatory process complex; similarly,
the data governance challenges intersect with privacy regulation and
organizational readiness. This section evaluates the boundaries within which
the UAV architecture needs to function; addressing them does not invalidate the
proposed architecture. Rather, it clarifies the conditions and proposes a way
forward.
Tab. 1
Principal categories of challenges,
limitations, and ethical considerations associated with drone-based rail safety
systems
|
Category & Theme |
Description (Core Issues) |
Example |
Mitigation |
|
Technical Challenges: Power, Endurance,
Communications |
Limited flight time; communication gaps;
weather sensitivity; data overload; hardware trade-offs |
Battery life restricts operational range;
data bottlenecks slow response |
Higher density/hybrid batteries; improved
networks; enhanced weatherproofing and data management |
|
Safety & Reliability Challenges: Drone
as a New Risk Vector |
Drones may crash onto tracks, distract
operators, false positives/negatives; vision system reliability; need for
fail safes |
Mid-air collisions; crew distraction; missed
or spurious alarms |
Rigorous fail-safes, redundant sensors,
regular calibration, operator training, operational protocols |
|
Regulatory & Legal Challenges: Aviation,
Privacy Regulation |
Strict BVLOS/urban rules; privacy concerns;
liability/insurance complexity; cybersecurity risks |
Delays from permits; blurred privacy
boundaries; unclear liability |
Engagement with regulators, privacy-centric
protocols, robust cybersecurity, liability/insurance |
|
Organizational: Workforce Adaptation, Data
Management |
Resistance to new tech; need for new
skillsets; data storage/integration; ongoing maintenance; ROI uncertainty |
Union reluctance; IT integration issues; new
maintenance demands |
Change management, upskilling, iterative IT
rollouts, cost-benefit studies |
|
Ethical Considerations: Privacy, Fairness,
Environment |
Surveillance discomfort; algorithmic bias;
job displacement; wildlife disturbance |
Community opposition; “black box” decisions;
staff morale issues |
Engagement, transparency, human-in-the-loop,
wildlife protocols, responsible job transition |
6.1.
Technical Challenges
As illustrated in Table
1, the primary constraint in the development of
UAVs is the energy density. It directly influences the flight time and
endurance, reducing corridor coverage and mission continuity. As discussed in Section
3: Energy management is crucial to optimize
the trade-offs between payload capacity, sensor integration, weather
resistance, and operational range. Moreover, additional protective hardware
also adds mass and reduces battery efficiency. Addressing this would require
system-level optimization rather than incremental hardware upgrades.
Another
technical challenge is connectivity & navigation: The railways frequently
pass through challenging terrain (Section 4.1),
resulting in GNSS signal degradation and communication becomes unstable. For
such environments, alternative localization strategies such as LiDAR-based SLAM
or visual-inertial odometry might be beneficial. These strategies require more
computational power and introduce new processing dependencies. Their
performance may vary considerably depending on corridor geometry and
environmental conditions.
As discussed
earlier, weather phenomena such as water and dust pose a serious threat to any
hardware deployed in the field. This problem would be an everyday reality for
the drones deployed in the field. To tackle this problem, weatherproofing
techniques are utilized such as IP54 certification, as it can stand against
rainfall and trackside-dust. These techniques solve one problem and
concurrently add the weight to the drone, this added weight consumes the
payload capacity as well as the flight time. As previously stated, these constraints are not merely a hardware
challenge, but rather, they are also of systems engineering significance. A
multidisciplinary approach is needed to address the complex interactions
between propulsion, regulation, connectivity, sensing, and data management.
6.2. Safety and Reliability Challenges
The drones
surrounding the track might also bring about further complexity. For example,
instability or failure of the drone in the air might cause it to crash into the
track. If not properly controlled, they might bring about secondary hazards.
The drones in operation can also use LiDAR or other technologies for detecting
and avoiding obstacles. The drone can also have a return-to-home feature in the
event of battery or signal failure. As such, it would require not only strong
hardware capabilities but also strong operating protocols and calibration.
The second
reliability concern relates to the quality of the underlying data. Both false
positive and false negative rates contribute to reduced reliability and
increased waiting times for traffic. Fallback strategies are crucial in case of
foggy camera vision or LiDAR beam scattering due to reflective rails, etc.
Sensor failure can occur due to physical or weather-related factors. Conducting
scenario drills, regular sensor calibrations and audits in real-world
conditions would mature the trust.
6.3.
Regulatory and Legal Challenges
Accident liability in drone
malfunctions, which leads to accident(s) presents complex questions of
responsibility allocation among operators, manufacturers, or software
developers. Therefore, a clear legal framework must be established. Also,
drones are susceptible to data manipulation or signal inference; end-to-end
encryption, authentication protocols, and strict cybersecurity standards are
foundational to a long-lasting system.
6.4. Organizational and Operational
Challenges
Technological
integration influences the organizational structure(s), especially
transitioning from traditional (manual) to UAV-based monitoring requires the
following: workforce adaptation, new skill development, and adjustment in
workflows. Resistance may emerge where automation is perceived as a disruptive
technology, instead of a supportive enhancement. However, in practice, drone
integration tends to shift roles toward higher-skilled analytical and
supervisory functions rather than eliminating safety responsibilities.
With
operational integration, logistical complexity also arrives: Data streams from
drones need harmonization with legacy inspection records, signaling system and
maintenance databases. Incompatibilities between "legacy" data and
new streams may also be significant; converting these streams into a consistent
and readable data structure is not straightforward. When a newly established
fleet generates an alarm, the decision support system (DSS) must review the IF–THEN-based control and balancing mechanism
discussed in Section 4.2. It
is therefore vital to ensure seamless integration in order to guarantee
robustness and effectiveness. In most cases, this may require the development
of customized software, which is then tested under field conditions.
A financial
challenge is one of the major challenges for any organization; the risks are
unknown, especially when new
technology adoption is concerned. Initial capital investment may be significant
such as platforms, charging infrastructure, analytics systems, and training
programs. Long-term cost efficiency through preventive maintenance is
plausible, but the returns must be demonstrated empirically through pilot
implementations.
6.5.
Ethical Considerations
The
UAV-enhanced security system will be under ethical scrutiny, most importantly
regarding the privacy concerns as noted in Section 6.3.
Communities located along railway corridors may perceive the aerial activities
as an intrusion, regardless of the intent. It is very critical to maintain
transparent communication regarding the scope and purpose of the gathered data.
Another ethical concern is with the accountability, as the overreliance on AI
decision-making processes for safety purposes. The DSS and automated alerts
must remain interpretable and subject to human oversight. Over-reliance on
machine outputs results in vaguely defined accountability and boundaries.
Without an expert judgement, this over-reliance puts everyone (the workers, nearby localities, railway
infrastructure, wildlife, etc.) in an ambiguous risk condition. Ensuring a
structured human-in-the-loop model (Sections 4.2 and
4.3)
mitigates this concern while preserving operational efficiency.
Job displacement concerns have an ethical dimension too. If drones and AI
drastically reduce the need for some roles, rail companies have an ethical duty
to retrain or reassign staff where possible. However, in the rail industry,
safety roles could often shift towards higher-skill positions (interpreting
drone data rather than walking the tracks), ideally improving working
conditions. Lastly, environmental ethics: To alternatives such as helicopters
(often used for aerial surveys), drones are electric and have a small carbon
and noise footprint.
The limitations and ethical considerations expressed above do not affect
the feasibility of the proposed architecture. On the contrary, they constitute
the scope within which the proposed architecture should be implemented. The way
forward lies in surmounting the challenges expressed above.
7.
FUTURE
DIRECTIONS AND RESEARCH OPPORTUNITIES
The development in the integration of drones in the field of rail safety
is moving at a rapid pace. Developments in sensing, autonomy, communication,
and regulation are expected to have a strong influence on the development of
drones. In the context of accident prevention through drone support, there are
several research areas which are considered promising:
Improved
Autonomy and BVLOS Operation: Reliable autonomous and beyond visual
line of sight (BVLOS) operations appear to be among the prerequisites that are
most pressing for the meaningful integration of rail drones going forward. As
discussed in Sections 6.1 and
6.3,
endurance limits, navigation uncertainty, and regulatory constraints currently
restrict deployment in practice. As described in Section 4.1,
geofencing, GNSS independent navigation and most importantly onboard
sense-and-avoid systems could result in safer linear corridor operation.
Results (pilot study) projecting high reliability may support regulatory
evolution regarding designated drone corridors along railway rights-of-way.
Enhanced
Power and Endurance: Energy constraints remain one of the more
persistent barriers to operational scalability (as outlined in Section 6.1 and
Section 3).
The issues and mitigation strategies related to technological development
highlighted in Table 1 suggest battery improvements, rapid charging hubs,
hybrid power, and automated battery-swap mechanisms. The future work can focus
on hybrid energy strategies such as solar gliders and hydrogen fuel-cell
drones. Such strategies should align with high endurance capabilities to extend
patrol duration without compromising payload capacity.
AI, Digital
Twin and Advanced Analytics: The DSS (as discussed in Section 4.2) is
a multi-level system that integrates Probabilistic reasoning via Bayesian
inference. Future research can enhance existing capabilities regarding anomaly
detection in two directions. First, adaptive learning through multi-modal
datasets, compound and hybrid AI integration, edge computing, and transformer
AI; second, developing digital twin environments and virtual models. It is not
yet established whether edge computing is capable of fully handling the
computational load. Research in sensor fusion logic would reduce operational
latency, leading to direct benefit for the predictive algorithms and risk
forecasting, if data quality and standardized labelling practices are upheld.
Swarm and
Cooperative Operations: Section 3
elaborates the response coordination logic, IoT platform architecture, and the
coordinated multi-drone operations, representing a logical next step for the
researchers and policy makers alike. Instead of isolated single-drone missions,
a mesh network, leapfrog monitoring technique or cooperative task allocation
can eliminate blind-spots and enhance response resilience. This collaborative
network could be the most feasible in current circumstances without altering
the fundamental rail-safety framework.
Integration
with Multi-Layer Sensing Ecosystems: Integration with multi-layer Sensing
Ecosystems: As demonstrated in the Monitoring and IoT integration architecture
described in Section 4.3,
drones tend to perform more reliably as part of a broader sensing network than
as standalone tools. A hierarchical combination of satellite imagery, patrol
aircraft, multi-rotor drone (with visual, LIDAR, or/and thermal), coordinating
with ground robots, train pilot and control room could satisfactorily fill up
information gaps and enhance decision safety respectively (mentioned in
Sections 3
& 4.2,
exemplified in scenarios 5.1
& 5.3).
Strengthening this layered intelligence model will enhance situational
awareness continuity while reducing single-point dependency risks.
Regulatory
and Policy Evolution: As discussed in Section 6.3,
BVLOS remains the central constraint among policymakers. Focusing on
context-specific guidelines, such as the monitoring of long-uninterrupted
railway corridors, investigating whether track-following drones increase the
risk level for low-flying aircraft, might be the way forward to provide the
necessary evidence base for decision-makers. The system-level drone integration
appears heavily reliant on regulation and policy rather than on technology alone, such as operational
protocol Standardization, cybersecurity enhancement, and corridor-specific
regulation.
Human-Centered
Interface Design: As emphasized in the human-in-the-loop model
discussed in Section 4.2 and
the ethical considerations of Section 6.5,
technological advancement must remain grounded in operator cognition and public
trust. Future development needs to prioritize the interface and alert system
that reduces information overload. Technologies like augmented reality (AR) or
clear dashboards can be used for this purpose. For example, hazard locations
could be displayed on a network map in real time via AR glasses worn by
dispatchers.
These
developments can provide quick access to detailed scenario feeds for better
decision-making. Research should determine the right decision balance between
an automated system and an expert. This balance ensures that operators are
supported well without overwhelming the expert overseeing the operation.
Longitudinal
Studies on Impact: With the implementation of pilot projects,
statistics on accident reduction, cost, inspection frequency, etc., are needed
to quantify benefits. These studies can help with policymaking, improving
systems, etc.
The future of
railway safety lies in integrating multi-sensor UAVs equipped with advanced
analytics, as illustrated in the manuscript. Current drone usage is quite
limited; the aforementioned improvements are crucial to achieving effective
advancements. Cooperative programs between academia, industry and governments,
as discussed in Section 3, can accelerate these transitions. In the coming
decade, UAVs are likely to take on meaningful inspection roles and change
operational practices.
8.
CONCLUSION
In light of
current literature, this study lays out a realistic framework for a
drone-integrated safety architecture for researchers and policymakers. The main
aim of the framework is to plan out a holistic railway safety framework of the
future, which is quick, agile, adaptive, and shifts the fundamental approach of
railway safety from time-based to continuous monitoring. This approach stands
on three pillars: multi-sensor UAVs, a probabilistic decision support system
(DSS), and a response mitigation mechanism. Through conceptual illustrations,
it is shown how early-stage detection, analysis, and intervention can
systematically reduce fatalities, infrastructure degradation, environmental
hazards, and intrusion risks. Meanwhile, Bayesian reasoning and automated
control logic work in the background; the framework also preserves expert
oversight for the decision hierarchy and accountability.
The
framework combines the existing system with systematic integration of UAVs,
making it a complementary layer of enhanced monitoring and decision-making, not
fully replacing or disrupting the established operations. With regard to the
integration of AI technology and data analytics for automation, drone-based
monitoring has demonstrated potential in terms of reliability, sustainability
and, most importantly, speed. Any challenges associated with technology or
regulation would be addressed through pilot projects.
References
1.
Aela
Peyman, Hung-Lin Chi, Ali Fares, Tarek Zayed, Minkoo Kim. 2024. “UAV-based
studies in railway infrastructure monitoring”. Automation in Construction
167: 105714. ISSN: 0926-5805. DOI: https://doi.org/10.1016/j.autcon.2024.105714.
2.
Kyriakidis Miltos, Kam To Pak, Arnab Majumdar. 2015. “Railway Accidents Caused by Human Error”. Transportation
Research Record: Journal of the Transportation Research Board 2476(1): 126-136. ISSN: 0361-1981. DOI: https://doi.org/10.3141/2476-17.
3.
Chen Gao,
Sam Rosolina, Elizabeth Padilla-Crespo, Guang He, Qiao Chen, Ana Arosemena, Bryan E. Rosado-Maldonado, Cynthia M. Swift,
Paula Belmont Coelho, Andrew J. Whelton, Dora Taggart, Frank E. Löffler. 2024.
“Natural Attenuation Potential of Vinyl Chloride and Butyl Acrylate Released in
the East Palestine, Ohio Train Derailment Accident”. Environmental Science
& Technology 58(40): 17743-17755.
ISSN: 0013-936X. DOI: https://doi.org/10.1021/acs.est.4c04198.
4.
Wróbel Jakub, Paweł
Bury, Mateusz Zając, Artur Kierzkowski, Sławomir Tubek, Jędrzej Blaut. 2024. “Fault Detection and Diagnostic Methods for Railway
Systems – A Literature Survey”. Advances in Science and Technology Research
Journal 18(6): 361-391.
ISSN: 2080-4075. DOI: https://doi.org/10.12913/22998624/191762.
5.
Jabłoński
Marek. 2022. “Emerging Modern Trends and Technologies Increasing the Level of
Rail Transport Safety”. In: Digital Safety in Railway Transport – Aspects of Management and Technology: 77-97. DOI: https://doi.org/10.1007/978-3-030-96133-6_8.
6.
Fayyad
Tahreer M., Su Taylor, Kun Feng, Felix Kin Peng Hui. 2025. “A scientometric
analysis of drone-based structural health monitoring and new technologies”. Advances
in Structural Engineering 28(1): 122-144. ISSN: 1369-4332.
DOI: https://doi.org/10.1177/13694332241255734.
7.
Kim
Min-kyeong, Duckshin Park, Suhwan Yun, Won-Hee Park, Duckhee Lee, Jeong-Duk
Chung, Kyung-Jin Chung. 2023. “Establishment of a Landscape Information Model
(LIM) and AI Convergence Plan through the 3D Digital Transformation of Railway
Surroundings”. Drones 7(3): 167. ISSN: 2504-446X. DOI: https://doi.org/10.3390/drones7030167.
8.
Gryech
Ihsane, Evgenii Vinogradov, Abdul Saboor, Petros S. Bithas, P. Takis
Mathiopoulos, Sofie Pollin. 2024. “A systematic literature review on the role
of UAV-enabled communications in advancing the UN’s sustainable development
goals”. Frontiers in Communications and Networks 5: 1286073. ISSN:
2673-530X. DOI: https://doi.org/10.3389/frcmn.2024.1286073.
9.
Kaewunruen
Sakdirat, Mohd Haniff Bin Osman, Panrawee Rungskunroch. 2019. “The Total Track Inspection”. Frontiers in Built
Environment 4: 84. ISSN: 2297-3362. DOI: https://doi.org/10.3389/fbuil.2018.00084.
10.
Sanz Bobi
Juan de Dios, Pablo Garrido Martínez-Llop, Pablo Rubio Marcos, Álvaro Solano Jiménez, Javier Gómez Fernández. 2024. “Prediction
of Degraded Infrastructure Conditions for Railway Operation”. Sensors
24(8): 2456. ISSN: 1424-8220. DOI: https://doi.org/10.3390/s24082456.
11.
Eurostat.
“Railway safety statistics in the EU”. Railway safety statistics in the EU.
Available at: https://ec.europa.eu/eurostat/statistics-explained/index.php?title=Railway_safety_statistics_in_the_EU.
12.
Liao
Yingying, Lei Han, Haoyu Wang, Hougui Zhang. 2022. “Prediction Models for
Railway Track Geometry Degradation Using Machine Learning Methods: A Review”. Sensors
22(19): 7275. ISSN: 1424-8220. DOI: https://doi.org/10.3390/s22197275.
13.
Qian Yu.
2024. “Intelligent railroad inspection and monitoring”. Frontiers in Built
Environment 10: 1389092. ISSN: 2297-3362. DOI: https://doi.org/10.3389/fbuil.2024.1389092.
14.
Jing
Guoqing, Xuanyang Qin, Haoyu Wang, Chengcheng Deng. 2022. “Developments,
challenges, and perspectives of railway inspection robots”. Automation in
Construction 138: 104242. ISSN: 0926-5805. DOI: https://doi.org/10.1016/j.autcon.2022.104242.
15.
Gong
Wendong, Muhammad Firdaus Akbar, Ghassan Nihad Jawad, Mohamed Fauzi Packeer
Mohamed, Mohd Nadhir Ab Wahab. 2022. “Nondestructive Testing Technologies for
Rail Inspection: A Review”. Coatings 12(11): 1790. ISSN: 2079-6412. DOI:
https://doi.org/10.3390/coatings12111790.
16.
Kumar
Ankit, S.P. Harsha. 2025. “A systematic literature review of defect detection
in railways using machine vision-based inspection methods”. International
Journal of Transportation Science and Technology 18: 207-226. ISSN: 2046-0430. DOI: https://doi.org/10.1016/j.ijtst.2024.06.006.
17.
Steele
Heather, Clive Roberts. 2022. “Towards a Sustainable Digital Railway”. In: Sustainable
Railway Engineering and Operations: 239-263. Emerald Publishing Limited. DOI: https://doi.org/10.1108/S2044-994120220000014014.
18.
Vieira
João, João Poças Martins, Nuno Marques de Almeida, Hugo Patrício,
João Gomes Morgado. 2022. “Towards Resilient and Sustainable Rail and
Road Networks: A Systematic Literature Review on Digital
Twins”. Sustainability 14(12): 7060. ISSN: 2071-1050. DOI: https://doi.org/10.3390/su14127060.
19.
Milewicz Julia, Daniel Mokrzan, Grzegorz M. Szymański. 2023. “Environmental Impact Evaluation as a Key Element
in Ensuring Sustainable Development of Rail Transport”. Sustainability
15(18): 13754. ISSN: 2071-1050. DOI: https://doi.org/10.3390/su151813754.
20.
Duan
Lirui, Jiajun Liu. 2024. “Smart composite materials and IoT: Revolutionizing
real-time railway health monitoring”. MRS Communications 15(1): 64-80. ISSN: 2159-6867. DOI: https://doi.org/10.1557/s43579-024-00667-9.
21.
Tang
Ruifan, Lorenzo De Donato, Nikola Bešinović, Francesco Flammini, Rob M.P.
Goverde, Zhiyuan Lin, Ronghui Liu, Tianli Tang, Valeria Vittorini, Ziyulong
Wang. 2022. “A literature review of Artificial Intelligence applications in
railway systems”. Transportation Research Part C: Emerging Technologies
140: 103679. ISSN: 0968-090X. DOI: https://doi.org/10.1016/j.trc.2022.103679.
22.
Jing
Guoqing, Mohammad Siahkouhi, J. Riley Edwards, Marcus S. Dersch, N.A. Hoult.
2021. “Smart railway sleepers – a review of recent developments, challenges,
and future prospects”. Construction and Building Materials 271: 121533.
ISSN: 0950-0618. DOI: https://doi.org/10.1016/j.conbuildmat.2020.121533.
23.
Gerhátová
Zuzana, Vladislav Zitrický, Vladimír Klapita. 2021. “Industry 4.0
Implementation Options in Railway Transport”. Transportation Research
Procedia 53: 23-30. ISSN: 2352-1465. DOI: https://doi.org/10.1016/j.trpro.2021.02.003.
24.
Tasiu
Ibrahim Adamu, Zhigang Liu, Siqi Wu, Wenqian Yu, Maged Al-Barashi, Joseph
Olorunfemi Ojo. 2022. “Review of Recent Control Strategies for the Traction
Converters in High-Speed Train”. IEEE Transactions on Transportation
Electrification 8(2): 2311-2333.
ISSN: 2332-7782. DOI: https://doi.org/10.1109/TTE.2022.3140470.
25.
Zhang
Zhengxin, Lixue Zhu. 2023. “A Review on Unmanned Aerial Vehicle Remote Sensing:
Platforms, Sensors, Data Processing Methods, and Applications”. Drones
7(6): 398. ISSN: 2504-446X. DOI: https://doi.org/10.3390/drones7060398.
26.
Hu Xi,
Rayan H. Assaad. 2023. “The use of unmanned ground vehicles (mobile robots) and
unmanned aerial vehicles (drones) in the civil infrastructure asset management
sector: Applications, robotic platforms, sensors, and algorithms”. Expert
Systems with Applications 232: 120897. ISSN: 0957-4174. DOI: https://doi.org/10.1016/j.eswa.2023.120897.
27.
Askarzadeh
Taraneh, Raj Bridgelall, Denver D. Tolliver. 2023. “Systematic Literature
Review of Drone Utility in Railway Condition Monitoring”. Journal of
Transportation Engineering, Part A: Systems 149(6). ISSN: 2473-2907. DOI: https://doi.org/10.1061/JTEPBS.TEENG-7726.
28.
Gbadamosi
Abdul-Quayyum, Lukumon O. Oyedele, Juan Manuel Davila Delgado, Habeeb Kusimo,
Lukman Akanbi, Oladimeji Olawale, Naimah Muhammed-yakubu. 2021. “IoT for
predictive assets monitoring and maintenance: An implementation strategy for
the UK rail industry”. Automation in Construction 122: 103486. ISSN:
0926-5805. DOI: https://doi.org/10.1016/j.autcon.2020.103486.
29.
Besinovic
Nikola, Lorenzo De Donato, Francesco Flammini, Rob M. P. Goverde, Zhiyuan Lin,
Ronghui Liu, Stefano Marrone, Roberto Nardone, Tianli Tang, Valeria Vittorini.
2022. “Artificial Intelligence in Railway Transport: Taxonomy, Regulations, and
Applications”. IEEE Transactions on Intelligent Transportation Systems
23(9): 14011-14024. ISSN: 1524-9050. DOI: https://doi.org/10.1109/TITS.2021.3131637.
30.
Thomas
D., M. Gündel, A. Wickers, M. Alpen, J. Horn. 2023. “Multivariate inspection of
German steel civil infrastructure using autonomous UAS”. In: Life-Cycle of
Structures and Infrastructure Systems: 493-500. CRC Press, London. DOI: https://doi.org/10.1201/9781003323020-58.
31.
Arroyo-Mora
Juan, Margaret Kalacska, Alireza Roghani, Oliver Lucanus. 2023. “Assessment of
UAS Photogrammetry and Planet Imagery for Monitoring Water Levels around
Railway Tracks”. Drones 7(9): 553. ISSN: 2504-446X. DOI: https://doi.org/10.3390/drones7090553.
32.
Simonović
Miloš, Milan Banić, Dušan Stamenković, Marten Franke, Kai Michels, Ingo Schoolmann, Danijela Ristić-Durrant, Cristian Ulianov,
Sergiu Dan-Stan, Alin Plesa, Marjan Dimec. 2024. “Toward the Enhancement of
Rail Sustainability: Demonstration of a Holistic Approach to Obstacle Detection
in Operational Railway Environments”. Sustainability 16(7): 2613. ISSN:
2071-1050. DOI: https://doi.org/10.3390/su16072613.
33.
Askarzadeh
Taraneh, Raj Bridgelall, Denver Tolliver. 2024. “Monitoring Nodal
Transportation Assets with Uncrewed Aerial Vehicles: A Comprehensive Review”. Drones
8(6): 233. ISSN: 2504-446X. DOI: https://doi.org/10.3390/drones8060233.
34.
Zhang
Ran, Guangbo Hao, Kong Zhang, Zili Li. 2024. “Reactive UAV-based automatic
tunnel surface defect inspection with a field test”. Automation in
Construction 163: 105424. ISSN: 0926-5805. DOI: https://doi.org/10.1016/j.autcon.2024.105424.
35.
Fan
Shuangshuang, Neil Bose, Zeming Liang. 2024. “Polar AUV Challenges and
Applications: A Review”. Drones 8(8): 413. ISSN: 2504-446X. DOI: https://doi.org/10.3390/drones8080413.
36.
Nex F.,
C. Armenakis, M. Cramer, D.A. Cucci, M. Gerke, E. Honkavaara, A. Kukko, C. Persello, J. Skaloud. 2022. “UAV in the advent of the
twenties: Where we stand and what is next”. ISPRS Journal of Photogrammetry
and Remote Sensing 184: 215-242.
ISSN: 0924-2716. DOI: https://doi.org/10.1016/j.isprsjprs.2021.12.006.
37.
Meng
Wenlong, Xuegang Zhang, Lvzhuoyu Zhou, Hangyu Guo, Xin Hu. 2025. “Advances in
UAV Path Planning: A Comprehensive Review of Methods, Challenges, and Future
Directions”. Drones 9(5): 376. ISSN: 2504-446X. DOI: https://doi.org/10.3390/drones9050376.
38.
Jiang
Zongchen, Jie Zhang, Yi Ma, Xingpeng Mao. 2021. “Hyperspectral Remote Sensing
Detection of Marine Oil Spills Using an Adaptive Long-Term Moment Estimation
Optimizer”. Remote Sensing 14(1): 157. ISSN: 2072-4292. DOI: https://doi.org/10.3390/rs14010157.
39.
Zhang
Chunwei, Hadi Kordestani, Mahdi Shadabfar. 2023. “A combined review of
vibration control strategies for high-speed trains and railway infrastructures:
Challenges and solutions”. Journal of Low Frequency Noise, Vibration and
Active Control 42(1): 272-291.
ISSN: 1461-3484. DOI: https://doi.org/10.1177/14613484221128682.
40.
Treccani
Daniele, Andrea Adami, Luigi Fregonese. 2024. “Drones and Real-Time Kinematic
Base Station Integration for Documenting Inaccessible Ruins: A Case Study
Approach”. Drones 8(6): 268. ISSN: 2504-446X. DOI: https://doi.org/10.3390/drones8060268.
41.
Yao
Yuwen, Cheng Sun, Tao Wang, Jianxing Yang, Enhui Zheng. 2024. “UAV
Geo-Localization Dataset and Method Based on Cross-View Matching”. Sensors
24(21): 6905. ISSN: 1424-8220. DOI: https://doi.org/10.3390/s24216905.
42.
Li
Haoran, Xiaoyao Hao, Juan Wen, Fangyuan Liu, Yiling Zhang. 2024.
“Multi-Objective Deployment of UAVs for Multi-Hop FANET: UAV-Assisted Emergency
Vehicular Network”. Drones 8(6): 262. ISSN: 2504-446X. DOI: https://doi.org/10.3390/drones8060262.
43.
Mordia
Ravikant, Arvind Kumar Verma. 2024. “Detection of Rail Defects Caused by
Fatigue due to Train Axles Using Machine Learning”. Transportation
Infrastructure Geotechnology 11(5): 3451-3468. ISSN:
2196-7202. DOI: https://doi.org/10.1007/s40515-024-00418-2.
44.
Mardanshahi
Ali, Abhilash Sreekumar, Xin Yang, Swarup Kumar Barman, Dimitrios Chronopoulos.
2025. “Sensing Techniques for Structural Health Monitoring: A State-of-the-Art
Review on Performance Criteria and New-Generation Technologies”. Sensors
25(5): 1424. ISSN: 1424-8220. DOI: https://doi.org/10.3390/s25051424.
45.
Abbasnejad
Behzad, Sahar Soltani, Alireza Ahankoob, Sakdirat Kaewunruen, Ali Vahabi. 2025.
“Industry 4.0 Technologies for Sustainable Transportation Projects:
Applications, Trends, and Future Research Directions in Construction”. Infrastructures
10(5): 104. ISSN: 2412-3811. DOI: https://doi.org/10.3390/infrastructures10050104.
46.
Zhang
Junrui, Zhongbo Huang, Xingbao Zhu, Fenghe Guo, Chenyang Sun, Quanxi Zhan,
Runjie Shen. 2024. “LOFF: LiDAR and Optical Flow Fusion Odometry”. Drones
8(8): 411. ISSN: 2504-446X. DOI: https://doi.org/10.3390/drones8080411.
47.
Xu
Jianshu, Yunfeng Zhang. 2025. “AI-Powered Digital Twin Technology for Highway
System Slope Stability Risk Monitoring”. Geotechnics 5(1): 19. ISSN:
2673-7094. DOI: https://doi.org/10.3390/geotechnics5010019.
48.
Yang
Yang, Zhanhao Liu, Junming Chen, Haiming Gao, Tao Wang. 2025. “Railway Foreign
Object Intrusion Detection Using UAV Images and YOLO-UAT”. IEEE Access
13: 18498-18509. ISSN: 2169-3536. DOI: https://doi.org/10.1109/ACCESS.2025.3533304.
49.
Baron
William, Marco daSilva. “Trespasser Detection on Railroad Property Using
Unmanned Aerial Vehicles”. Technical report. Available at: https://railroads.dot.gov/sites/fra.dot.gov/files/2020-09/Trespassers%20and%20UAVs-A%20v2.pdf.
50.
Al-Absi
Mohammed Abdulhakim, Rui Fu, Ki-Hwan Kim, Young-Sil Lee, Ahmed Abdulhakim
Al-Absi, Hoon-Jae Lee. 2021. “Tracking Unmanned Aerial Vehicles Based on the
Kalman Filter Considering Uncertainty and Error Aware”. Electronics
10(24): 3067. ISSN: 2079-9292. DOI: https://doi.org/10.3390/electronics10243067.
51.
An Min,
Wanchang Lin, Sheng Huang. 2013. “An Intelligent Railway Safety Risk Assessment
Support System for Railway Operation and Maintenance Analysis”. The Open Transportation Journal 7(1): 27-42. ISSN: 1874-4478. DOI: https://doi.org/10.2174/1874447801307010027.
52.
Schmidt
Jennifer, Jessica Lingenfelter. 2018. “Heavy Truck and Bus Traversability at
Highway-Rail Grade Crossings”. Technical report.
Received 21.10.2025; accepted in revised form 27.02.2026
![]()
Scientific Journal of Silesian
University of Technology. Series Transport is licensed under a Creative
Commons Attribution 4.0 International License