Article
citation information:
Pandit,
A., Budhkar, A.K. Impact of fog on dynamic parameters
of vehicles in mixed traffic. Scientific
Journal of Silesian University of Technology. Series Transport. 2025, 128, 183-197. ISSN: 0209-3324. DOI: https://doi.org/10.20858/sjsutst.2025.128.11
Angshuman PANDIT[1],
Anuj Kishor BUDHKAR[2]
IMPACT OF FOG ON
DYNAMIC PARAMETERS OF VEHICLES IN MIXED TRAFFIC
Summary. The impact of fog on
vehicle behavior under weak-lane discipline and
heterogeneous traffic – typical of Indian highways – has not been adequately
explored. This study investigates vehicle dynamics under varying fog densities
(visibility range: 50–1000 meters). Real-time trajectory and visibility data
were extracted by a novel image processing technique from highway video
footage. The analysis reveals systematic adaptations in driver behavior: in shallow fog, longitudinal speeds increase, but
in dense fog, drivers exhibit more abrupt longitudinal movements, with 85th
percentile acceleration and braking reaching 4 m/s². However, lateral
accelerations remain below 1 m/s². This suggests that in reduced
visibility, perceptual uncertainties lead to risk-prone longitudinal movements,
amplifying the potential for multi-vehicle collisions. The insights from this
study are directly applicable to microscopic traffic simulation models,
providing values of fog-induced acceleration, deceleration, and speed values
for different scenarios. For practitioners and traffic operators, the findings
underline the importance of visibility-aware interventions such as dynamic
speed regulation, improved road-edge delineation, and vehicle-to-infrastructure
(V2I) warnings. For drivers, the study offers evidence-based reasoning for
cautious longitudinal driving and establishes the risks of overestimating
visibility. Overall, this research bridges a critical gap in understanding
fog-related traffic dynamics under complex driving conditions.
Keywords: fog, speed, acceleration, deceleration, car-following
1. INTRODUCTION
Inclement weather
poses significant risks to traffic safety by affecting visibility, driver
behavior, and vehicle performance. Fog, in particular, is the most hazardous,
with studies showing that fog can increase crash risk by up to 40%
The problem is
especially acute in countries with heterogeneous traffic (like India), where
different vehicle types with different sizes and maneuverability, like cars,
trucks, motorized two-wheelers, buses, etc. share the same road space. Lateral
maneuvers are very prominent, as no lane discipline is followed in
heterogeneous traffic
Therefore, the objective of this paper is to analyze the lateral
and longitudinal acceleration and speed patterns of different vehicle types in
fog, using high-resolution trajectory data to better understand
fog-induced traffic behavior in mixed traffic
conditions. This study is important because speed, acceleration, and
deceleration patterns are direct indicators of driver response and control.
Under fog, abrupt longitudinal changes or lateral instability significantly
raise the probability of crashes
2. LITERATURE
REVIEW
2.1.
Measurement of fog
The
accurate measurement of visibility in fog is necessary for understanding its
impact on traffic operations and safety. According to the World Meteorological
Organization (WMO), visibility is the length of a path in the atmosphere
required to reduce the luminous flux in a collimated beam from an incandescent
lamp, at a color temperature of 2700 Kelvins to 5% of its original value
2.2. Effect of
fog on traffic safety
Driving
in foggy conditions significantly affects driver behavior
due to reduced visibility, which impairs the ability to perceive vehicles, road
signs, or obstacles, often leading to reduced speeds
Although
prior studies have investigated speed reduction and headway changes in foggy
conditions, the analysis of vehicle dynamics – particularly lateral and
longitudinal acceleration – remains limited. Some studies suggest that lateral
acceleration decreases with increasing speed
3. DATA
COLLECTION AND EXTRACTION
3.1. Data
collection
To
capture accurate vehicle dynamics under different fog levels, this study
requires naturalistic trajectories of a large number of vehicles. Thus, data
were collected from video recordings on eight straight mid-block highway
sections known for frequent winter fogs. Two- and three-lane carriageway
highways across West Bengal and Punjab, India, were chosen, covering both urban
and interurban settings. This diverse selection ensured a representative mix of
traffic types, fog intensities, and road configurations, minimizing the
influence of external factors other than fog and traffic flow. Videos were
recorded in January from 7 AM to 10 AM, from unobtrusive vantage points to
preserve natural driving behavior in diverse fog
conditions. The data collection setup and a sample video frame are shown in
Fig. 1, with Table 1 detailing the selected traffic sections.


Fig. 1. Data
collection setup and snapshot of video data
Tab. 1
Traffic data collection
locations
|
S. No |
Name of the road |
Location of the section |
Lanes per carriageway |
Type of road |
|
1 |
NH-16, (Chennai-Kolkata
Highway) |
Salkia,
Dist. Howrah West Bengal |
3 |
Urban |
|
2 |
West Bengal
SH-13 (Delhi Road) |
Chandannagar,
Dist. Hoogly, West Bengal |
2 |
Inter-urban |
|
3 |
NH-5 (Airport
Road) |
Knowledge
City, Dist. SAS Nagar, Punjab |
3 |
Urban |
|
4 |
NH-7(Chandigarh-Patiala
Road) |
Ramgarh,
Dist. SAS Nagar, Punjab |
2 |
Urban |
|
5 |
NH-7 (Rajpura
bypass) |
Rajpura, Dist. Patiala, Punjab |
2 |
Inter-urban |
|
6 |
NH-8 (Ambala-Chandigarh
Road) |
Zirakpur,
Dist. SAS Nagar, Punjab |
2 |
Inter-urban |
|
7 |
NH-44 (Grand Trunk
Road) |
Rajpura, Dist. Patiala, Punjab |
3 |
Inter-urban |
|
8 |
NH-44, (Grand Trunk
Road) |
Madhopur,
Dist. Fatehgarh-Sahib, Punjab |
3 |
Inter-urban |
Vehicle
detection and tracking were conducted by custom-training a machine-learning
YOLO algorithm with annotated images from recorded traffic videos
3.2. Smoothing
of vehicle trajectory
Vehicle trajectories extracted from video data are prone to noise and
can lead to unrealistic kinematic properties
Using
the smoothed trajectories, every vehicle's instantaneous lateral, and
longitudinal speeds, accelerations are calculated by determining the first
(speed) and second-order (acceleration) derivatives of trajectory to time. The
direction of the road is regarded as longitudinal, while the direction
transverse to the road is considered lateral for calculation in this paper.
3.3.
Visibility estimation
Visibility
is the farthest distance at which a non-reflective black object can be
identified against a uniform background. This study uses Hautiere’s
method
The
contrast ration, ![]() (Equation-1) was measured at different
distances. Actual distance was calculated from image coordinates converted to
real-world by camera calibration
(Equation-1) was measured at different
distances. Actual distance was calculated from image coordinates converted to
real-world by camera calibration
![]() (1)
(1)
where
![]() denotes brightness values for black (b) and
white (w) areas in foggy (f) and clear (c) conditions. The distance at which
the contrast difference reaches 5% of its value in clear weather conditions (
denotes brightness values for black (b) and
white (w) areas in foggy (f) and clear (c) conditions. The distance at which
the contrast difference reaches 5% of its value in clear weather conditions (![]() )
is termed as the visibility and is calculated by interpolating or extrapolating
the obtained contrast values at various distances
)
is termed as the visibility and is calculated by interpolating or extrapolating
the obtained contrast values at various distances
![]()

![]()
Fig. 2.
Estimation of visibility using black and white objects at various distances
4. ANALYSIS
This
study investigates the influence of fog-induced reduced visibility on vehicle
dynamics, particularly speed and acceleration patterns under following and
free-flow conditions. The ‘following’ condition is defined by (i) lateral overlap, (ii) time headway
≤ 4 sec based on Indo-HCM
Tab.
2
Effect size
analysis of different dynamic parameters
between two-lane and three-lane roads
|
Parameter |
Mean |
Cohen’s d |
η² |
|
|
Two-lane |
Three-lane |
|||
|
Longitudinal speed |
76.28 |
70.60 |
0.22 |
0.009 |
|
Lateral speed |
1.51 |
1.62 |
-0.07 |
0.001 |
|
Longitudinal acceleration |
1.45 |
1.87 |
-0.21 |
0.009 |
|
Lateral acceleration |
0.32 |
0.28 |
0.09 |
0.002 |
4.1. Effect of
fog on lateral and longitudinal speed
Figure
3 presents a box-plot illustrating the relationship between the obtained speed
(longitudinal and lateral) and visibility.
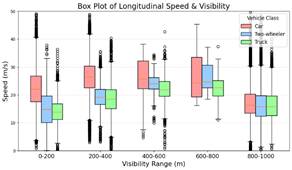
(a)
Longitudinal
(left) and lateral speed (right) vs. visibility at thefollowing condition
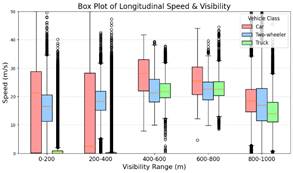
(b)
Longitudinal
(left) and lateral speed (right) vs. visibility at free-flowing condition
Fig. 3. Box
plot of longitudinal and lateral speed at following and free-flowing conditions
Tab.
3
85th
percentile longitudinal and lateral speed of following and free-flowing
vehicles
|
Driving conditions and vehicle type (2W = Two-wheeler) |
Fog level (m) |
|||||||
|
0-200 |
200-400 |
400-600 |
600-800 |
Non-foggy |
||||
|
Following vehicles |
Longitudinal speed (m/s) |
Mean |
Car |
22.34 |
26.28 |
26.14 |
25.9 |
17.21 |
|
2W |
14.89 |
19.34 |
23.41 |
26.45 |
16.43 |
|||
|
Truck |
14.05 |
18.28 |
21.93 |
22.21 |
16.38 |
|||
|
85th |
Car |
29.2 |
32.25 |
33.57 |
34.56 |
22.92 |
||
|
2W |
21.58 |
23.86 |
30.4 |
32.91 |
22.62 |
|||
|
Truck |
18.51 |
23.46 |
26.19 |
25.96 |
22.05 |
|||
|
Lateral speed (m/s) |
Mean |
Car |
0.54 |
0.38 |
0.47 |
0.42 |
0.58 |
|
|
2W |
0.39 |
0.44 |
0.21 |
0.28 |
0.56 |
|||
|
Truck |
0.29 |
0.27 |
0.18 |
0.16 |
0.47 |
|||
|
85th |
Car |
1.03 |
0.67 |
0.9 |
0.79 |
0.89 |
||
|
2W |
0.71 |
0.77 |
0.37 |
0.56 |
0.77 |
|||
|
Truck |
0.49 |
0.45 |
0.34 |
0.32 |
0.88 |
|||
|
Free-flowing vehicles |
Longitudinal speed (m/s) |
Mean |
Car |
17.77 |
13.86 |
27.24 |
26.88 |
18.63 |
|
2W |
15.8 |
18.07 |
21.8 |
22.6 |
17.18 |
|||
|
Truck |
3.63 |
3.71 |
22.15 |
22.84 |
14.83 |
|||
|
85th |
Car |
32.1 |
31.68 |
34.11 |
37.36 |
25.12 |
||
|
2W |
22.57 |
23.79 |
27.28 |
32.53 |
26.6 |
|||
|
Truck |
13.72 |
14.72 |
26.33 |
27.17 |
20.49 |
|||
|
Lateral speed (m/s) |
Mean |
Car |
0.38 |
0.2 |
0.38 |
0.45 |
0.65 |
|
|
2W |
0.39 |
0.41 |
0.27 |
0.24 |
0.63 |
|||
|
Truck |
0.08 |
0.06 |
0.14 |
0.15 |
0.41 |
|||
|
85th |
Car |
0.79 |
0.48 |
0.74 |
0.76 |
1.11 |
||
|
2W |
0.71 |
0.69 |
0.5 |
0.38 |
1.27 |
|||
|
Truck |
0.16 |
0.09 |
0.27 |
0.28 |
0.82 |
|||
|
Sample size |
Following vehicles |
Car |
978 |
964 |
29 |
20 |
491 |
|
|
2W |
276 |
409 |
9 |
10 |
310 |
|||
|
Truck |
87 |
224 |
119 |
68 |
177 |
|||
|
Free-flowing vehicle |
Car |
3676 |
1952 |
71 |
30 |
1213 |
||
|
2W |
2043 |
1282 |
47 |
22 |
945 |
|||
|
Truck |
754 |
688 |
298 |
176 |
598 |
|||
The
85th percentile value is used for analysis (Table 3), as it
represents the maximum threshold at which most drivers operate, providing a
safer benchmark for traffic design and management
(i) Longitudinal Speed vs. Visibility: As visibility
improves, longitudinal speed increases for all vehicles. Surprisingly, car
speeds in dense fog remain higher than in clear weather, raising safety
concerns.
(ii)
Lateral Speed Behavior: Lateral speeds drop in fog,
but following cars show slightly higher lateral speeds in dense fog, suggesting
reduced lateral stability.
(iii)
Risk in Medium Fog: Medium and shallow fog lead to high speeds and poor speed
judgment, increasing rear-end collision risk, especially if the lead vehicle
brakes suddenly. This trend is consistent with previous literature
(iv)
Truck Driver Behavior: Trucks maintain low speeds in
both directions during fog, reflecting consistently safe and cautious driving.
4.2. Effect of
fog on lateral and longitudinal acceleration
Simultaneous
lateral and longitudinal accelerations are visualized using a g-g diagram,
where both values are normalized by gravitational acceleration (g) and plotted
along horizontal and vertical axes, respectively. This plot, termed the driver
capability envelope
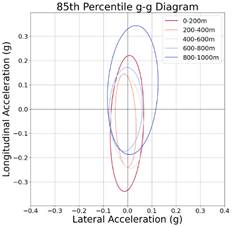
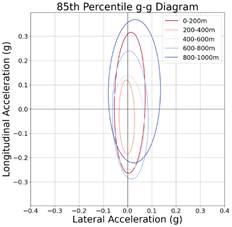
(a)
Following
cars (b)
Free-flowing cars
(a)
Following
two-wheelers (b)
Free-flowing two-wheelers
(a)
Following
trucks (b) Free-flowing
trucks
Fig. 4. g-g
diagram of following and free-flowing vehicles in different visibility
The
g-g diagram, presented in Fig. 4, is ellipsoidal with the major axis at the
longitudinal acceleration end. It shows a narrower spread of lateral
acceleration for medium and shallow fog. This suggests that drivers are more
cautious in medium and shallow foggy weather and avoid acceleration in any
direction. However, in dense fog, the spread increases towards both axes for
cars and two-wheelers, suggesting that drivers may be slightly more inclined to
lateral and longitudinal movements in dense fog than at other fog levels. The
envelope inclines towards the braking side for following cars in fog,
indicating frequent and rapid braking action by following vehicles to keep a
safe distance from the lead vehicle. For two-wheelers, this envelope inclines
toward the accelerating side in clear weather. However, for truck drivers, the
envelopes are very small in every fog conditions, especially in free-flow
conditions. This suggests that truck drivers drive very stably in foggy weather
which is the safest driving behavior.
For
a clearer understanding of the acceleration behavior,
85th percentile values of longitudinal and lateral acceleration are
plotted with visibility and shown in Fig. 5, and the discussion follows
thereafter.
(i) Longitudinal acceleration (A) and deceleration (D): Fig.
5 shows that longitudinal A/D is high (85th percentile value
>3m/s2) for free-flowing and following vehicles in denser fog for
cars and two-wheelers, indicating that the drivers become highly sensitive to
acceleration and braking. Further, this abrupt driving decreases as the
visibility improves. Values of these parameters are higher for free-flowing
cars and two-wheelers in fog, since the free-flowing vehicle is traveling
without any guiding element, enabling the drivers to be more restless in their
longitudinal movement. However, A/D values are very low for trucks, especially
in free-flow conditions, suggesting truck drivers drive very safely in lower
visibility, as also observed in their speed behavior.
(ii)
Lateral acceleration and deceleration: From Fig. 5, it can be observed that
lateral A/D decreases in foggy weather (<1m/s2). For following
vehicles, this is likely because, in reduced visibility, drivers focus on
following the lead vehicle closely, primarily adjusting their speed through
longitudinal acceleration and braking rather than lateral maneuvers.
For free-flowing vehicles, no particular trend is observed, although overall
lesser lateral A/D values are observed in fog. Similar findings are observed
for two-wheelers and trucks, with very low A/D values for trucks.
Overall,
it was revealed that car and two-wheeler drivers tend to exhibit more restless
longitudinal movements in dense fog. This behavior
may result from subtle visual cues caused by the dense fog, which can create
the illusion of obstacles or hazards ahead. Such visual misinterpretations
often prompt rapid acceleration or deceleration, compromising safety and
increasing crash risk. Sudden maneuvers by a leading
vehicle in dense fog may leave following vehicles with insufficient time to
react, significantly raising the likelihood of collisions. However, truck
drivers drive very cautiously in any fog conditions, especially in free-flow
conditions.
(a)
Longitudinal
(left) and lateral (right) acceleration vs. visibility at following vehicle
(b)
Longitudinal
(left) and lateral (right) acceleration vs. visibility at
free-following vehicle
Fig. 5.
Variation of longitudinal and lateral acceleration and deceleration with
visibility
5. CONCLUSION
This
study investigates the effects of reduced visibility due to fog on vehicle
dynamics in weak-lane discipline traffic, focusing on speed, lateral and
longitudinal acceleration, and car-following behavior
under various fog conditions. The findings of (i)
increased longitudinal speed in shallow fog levels, (ii) decreased lateral
speed in foggy weather, (iii) more restless longitudinal movement (higher
braking/acceleration up to 4 m/s2) by cars and two-wheelers in foggy
weather, (iv) lesser lateral acceleration/deceleration values (less than 1m/s2),
and (v) safest driving by trucks, in this paper can be detrimental for
predicting driving movement in foggy weather. The findings of speed in fog, and
lateral and longitudinal acceleration in non-foggy weather confirm with the
studied literature
The
findings in this paper highlight the need for better traffic management and
safety measures to mitigate risks associated with lane-changing and speed
variability in dense fog
(0-200 m). Traffic safety measures, such as improved road markings, better lane
management, and fog-related warning systems, may be implemented to address
these behaviors.
Future
research could focus on incorporating these findings into car-following model
calibration and traffic simulation models to replicate driver behavior more
accurately in foggy conditions. These models could be applied to generate
traffic streams under various visibility levels and improve accident analysis,
allowing for more effective warning systems that alert drivers about impending
hazards caused by reduced visibility.
References
1.
Wu Y., M. Abdel-aty,
J. Lee. 2018. “Crash risk analysis during fog conditions using real-time
traffic data”. Accident Analysis & Prevention 114: 4-11. DOI: 10.1016/j.aap.2017.05.004.
2.
Moore R.L., L. Cooper. 1972. Fog and Road
Traffic.
3.
Edwards J.B. 1999. “Speed adjustment of motorway
commuter traffic to inclement weather”. Transportation Research Part F:
Traffic Psychology and Behaviour 2: 1-14. DOI: 10.1016/S1369-8478(99)00003-0.
4.
Khan M.N., A. Ghasemzadeh, M.M. Ahmed. 2018.
“Investigating the impact of fog on freeway speed selection using the SHRP2
naturalistic driving study data”. Transportation Research Record: Journal of
the Transportation Research Board 2672(16): 93-104. DOI: 10.1177/0361198118774748.
5.
Peng Y., M. Abdel-aty,
J. Lee, Y. Zou. 2018. “Analysis of the impact of fog-related reduced visibility
on traffic parameters”. Journal of Transportation Engineering, Part A:
Systems 144: 1-8. DOI: 10.1061/jtepbs.0000094.
6.
Al-Ghamdi A.S. 2007. “Experimental evaluation of
fog warning system”. Accident Analysis & Prevention 39: 1065-1072.
DOI: 10.1016/j.aap.2005.05.007.
7.
Snowden R.J., N. Stimpson, R.A. Ruddle. 1998.
“Fog and driving”. Nature 392(450).
8.
Pretto P., M. Vidal, A. Chatziastros.
2008. “Why fog increases the perceived speed”. In: Proceedings of the
Driving Simulation Conference: 223-235. DSC 2008 Europe – Monaco – 31
January - 1 February 2008.
9.
Kim Y.-K., H. Kim, J.-W. Seo,
H.-Y. An, Y.-H. Choi. 2017.
“Meteorological analysis of the sea fog in winter season on Gyeonggi
Bay, Yellow Sea: A case study for the 106-vehicle pileup on February 11, 2015”.
Journal of Coastal Research 79: 124-128. DOI: 10.2112/SI79-026.1.
10. Munigety C.R., T.V.
Mathew. 2016. “Towards behavioral modeling of drivers in mixed traffic
conditions”. Transportation in Developing Economies 2: 1-20. DOI: 10.1007/s40890-016-0012-y.
11. Damani
J., P. Vedagiri. 2021. “Safety of motorised
two wheelers in mixed traffic conditions: Literature review of risk factors”. Journal
of Traffic and Transportation Engineering 8: 35-56. DOI: 10.1016/j.jtte.2020.12.003.
12. Pandit
A., A.K. Budhkar. 2025. “Impact of fog levels on
free-flow speeds in mixed traffic conditions”. Communications – Scientific
Letters of the University of Žilina. DOI: 10.26552/com.C.2025.019.
13. Li Q., H. Yao, X. Li. 2022. “A matched case-control
method to model car-following safety”. Transportmetrica
A: Transport Science 19(3). DOI: 10.1080/23249935.2022.2055198.
14. Kar
P., S.P. Venthuruthiyil, M. Chunchu.
2023. “Assessing the crash risk of mixed traffic on multilane rural highways
using a proactive safety approach”. Accident Analysis & Prevention
188: 107099. DOI: 10.1016/j.aap.2023.107099.
15. WMO
G. 1996. Guide to Meteorological Instruments and Methods of Observation.
16. Dumont
E., V. Cavallo. 2004. “Extended photometric model of fog effects on road
vision”. Transportation Research Record: Journal of the Transportation
Research Board 1862: 77-81.
17. Ovseník Ľ., J. Turán, P. Mišenčík, J. Bitó, L.
Csurgai-Horváth. 2013. “Fog density measuring system”. Acta Electrotechnica et Informatica 12(2): 67-71. DOI: 10.2478/v10198-012-0021-7.
18. Meteorological
A. 2013. AMOFSG/10. Forecast Study Group.
19. Hautière
N., D. Aubert, E. Dumont. 2007. “Mobilized and mobilizable visibility distances
for road visibility in fog”. In: Proceedings of the 26th Session of the
International Commission on Illumination (CIE): 1-4. Beijing, China.
20. Cavallo
V. 2002. “Perceptual distortions when driving in fog”. In: Proceedings of
the Conference on Traffic and Transportation Studies (ICTTS): 965-972.
21. Peng
Y., M. Abdel-aty, M. Lee, Y. Zou. 2018. “Analysis of
the impact of fog-related reduced visibility on traffic parameters”. Journal
of Transportation Engineering, Part A: Systems 144: 1-8. DOI: 10.1061/JTEPBS.0000094.
22. Tu H., Z. Li, H.
Li, K. Zhang, L. Sun. 2015. “Driving
simulator fidelity and emergency driving behavior”. Transportation Research
Record: Journal of the Transportation Research Board 2518: 113-121. DOI: 10.3141/2518-15.
23. Pretto
P., M. Vidal, A. Chatziastros. 2008. “Why fog
increases the perceived speed”. In: Proceedings of the Driving Simulation
Conference: 223-235. DSC 2008 Europe – Monaco – 31 January - 1 February
2008.
24. Kocmond W.C., K. Perchonok. 1970. “Highway fog”. NCHRP Research Results
Digest 15.
25. Federal
Highway Administration. Mitigation Strategies for Design Exceptions. Available
at: https://safety.fhwa.dot.gov/geometric/pubs/mitigationstrategies/chapter3/
3_stopdistance.cfm.
26. Hoogendoorn
R.G., S.P. Hoogendoorn, K.A. Brookhuis, W. Daamen. 2011. “Adaptation longitudinal driving behavior,
mental workload, and psycho-spacing models in fog”. Transportation Research
Record: Journal of the Transportation Research Board 2249: 20-28. DOI: 10.3141/2249-04.
27. Hoogendoorn
R. 2012. Empirical Research and Modeling of Longitudinal Driving Behavior
Under Adverse Conditions. Delft, Netherlands: TRAIL Research School.
28. Pei
Y., G. Cheng. 2004. “Research on the relationship between discrete character of
speed and traffic accident and speed management of freeway”. China Journal
of Highway and Transport 17(1): 74-78.
29. Hosseinpour
M., A.S. Yahaya, A.F. Sadullah. 2014. “Exploring the effects of roadway
characteristics on the frequency and severity of head-on crashes: Case studies
from Malaysian Federal Roads”. Accident Analysis & Prevention 62:
209-222. DOI: 10.1016/j.aap.2013.10.001.
30. Chaudhari
M. 2020. “Analyzing risky behavior in traffic accidents”. In: Proceedings of
the IEEE International Conference on Systems, Man, and Cybernetics (SMC 2020):
464-471. DOI: 10.1109/SMC42975.2020.9283330.
31. Zhao
C., H. Yu, T.G. Molnar. 2023. “Safety-critical traffic control by connected
automated vehicles”. Transportation Research Part C: Emerging Technologies
154: 104230. DOI: 10.1016/j.trc.2023.104230.
32. Mallikarjuna
C., B. Tharun, D. Pal. 2013. “Analysis of the lateral gap maintaining behavior
of vehicles in heterogeneous traffic stream”. Procedia – Social and
Behavioral Sciences 104: 370-379. DOI: 10.1016/j.sbspro.2013.11.130.
33. Gong
B., R. Wei, D. Wu, C. Lin. 2020. “Fleet management for heavy-duty vehicles and
connected automated vehicles on highway in dense fog environment”. Journal
of Advanced Transportation. Article ID: 8842730. DOI: 10.1155/2020/8842730.
34. Brooks
J.O., M.C. Crisler, N. Klein, R. Goodenough, R.W. Beeco,
C. Guirl, P.J. Tyler, A. Hilpert, Y. Miller, J. Grygier, et al. 2011. “Speed
choice and driving performance in simulated foggy conditions”. Accident
Analysis & Prevention 43: 698-705.
35. Zhang
Y., Z. Guo, B. Zhu, Z. Fan, H. Zhang. 2021. “Analysis of compensatory driving
behavior under fog weather conditions”. Green and Intelligent Technologies
for Sustainable and Smart Asphalt Pavements: 662-668. CRC Press.
36. Soria I., L. Elefteriadou, A. Kondyli. 2014. “Assessment of
car-following models by driver type and under different traffic and weather
conditions using data from an instrumented vehicle”. Simulation Modelling
Practice and Theory 40: 208-220.
37. Hammit
B.E., A. Ghasemzadeh, R.M. James, M.M. Ahmed, R.K. Young. 2018. “Evaluation of
weather-related freeway car-following behavior using the SHRP 2 naturalistic
driving study database”. Transportation Research Part F: Traffic Psychology
and Behaviour 59: 244-259.
38. Jocher G., A. Chaurasia. 2023.
“YOLO by Ultralytics (Version 8.0.0)”. Computer
software. Available at: https://github.com/ultralytics/ultralytics.
39. Tao
J., H. Wang, X. Zhang, X. Li, H. Yang. 2017. “An object detection system based
on YOLO in traffic scene”. In: Proceedings of the 6th International
Conference on Computer Science and Network Technology (ICCSNT 2017): 1532-1536.
IEEE.
40. Fung
G.S.K., N.H.C. Yung, G.K.H. Pang. 2003. “Camera calibration from road lane
markings”. Optical Engineering 42: 2967. DOI: 10.1117/1.1606458.
41. Venthuruthiyil S.P., M. Chunchu. 2018. “Trajectory reconstruction using locally
weighted regression: A new methodology to identify the optimum window size and
polynomial order”. Transportmetrica A:
Transport Science 14: 881-900. DOI: 10.1080/23249935.2018.1449032.
42. Kanagaraj V., G. Asaithambi, T. Toledo,
T.C. Lee. 2015. “Trajectory data and flow characteristics of mixed
traffic”. Transportation Research Record: Journal of the Transportation
Research Board 2491: 1-11. DOI: 10.3141/2491-01.
43. Punzo V., D.J. Formisano, V. Torrieri. 2005. “Nonstationary Kalman
filter for estimation of accurate and consistent car-following data”. Transportation
Research Record: Journal of the Transportation Research Board 1934(1): 3-12.
DOI: 10.1177/0361198105193400101.
44. Jekabsons G. 2016. Locally
weighted polynomials toolbox for MATLAB/Octave. Riga, Latvia: Available at http://www.cs.rtu.lv/jekabsons.
45. Indian
Highway Capacity Manual: Indo-HCM. 2017. CSIR.
46. Toledo
T., H.N. Koutsopoulos, M. Ben-Akiva. 2007.
“Integrated driving behavior modeling”. Transportation Research Part C:
Emerging Technologies 15: 96-112. DOI: 10.1016/j.trc.2007.02.002.
47. White
L. 2011. Modeling of 85th Percentile Speed for Rural Highways for Enhanced
Traffic Safety: Final Report – FHWA-OK-11-07 (January 2009): 1-25.
48. Biral
F., M. Da Lio, E. Bertolazzi. 2005. “Combining safety
margins and user preferences into a driving criterion for optimal control-based
computation of reference maneuvers for an ADAS of the next generation”. In: Proceedings
of the IEEE Intelligent Vehicles Symposium: 36-41. DOI: 10.1109/IVS.2005.1505074.
49. Mahapatra G., A.K. Maurya. 2018.
“Dynamic parameters of vehicles under heterogeneous traffic stream with
non-lane discipline: An experimental study”. Journal of Traffic and
Transportation Engineering 5: 386-405. DOI: 10.1016/j.jtte.2018.01.003.
50. Xu
J., W. Lin, X. Wang, Y.M. Shao. 2017. “Acceleration and deceleration
calibration of operating speed prediction models for two-lane mountain
highways”. Journal of Transportation Engineering 143: 1-13. DOI: 10.1061/JTEPBS.0000050.
Received 04.06.2025; accepted in revised form 20.08.2025
![]()
Scientific Journal of Silesian
University of Technology. Series Transport is licensed under a Creative
Commons Attribution 4.0 International License