Article citation information:
Liubyi,
Y., Horbachov, P., Kovtsur, K., Muzylyov,
D., Ivanov, V. Simulation of the advance time of permissive traffic signal
activation following the coordination plan on arterials: plan of the experiment.
Scientific Journal of Silesian University
of Technology. Series Transport. 2025, 126,
117-128. ISSN: 0209-3324. DOI: https://doi.org/10.20858/sjsutst.2025.126.7.
Yevhen LIUBYI[1],
Peter HORBACHOV[2],
Kateryna KOVTSUR[3],
Dmitriy MUZYLYOV[4],
Vitalii IVANOV[5]
SIMULATION OF THE ADVANCE TIME OF PERMISSIVE TRAFFIC SIGNAL ACTIVATION
FOLLOWING THE COORDINATION PLAN ON ARTERIALS: PLAN OF THE EXPERIMENT
Summary. The paper
presents a methodology for evaluating the accuracy of analytical models for
determining the advance time of a traffic light at the next intersection in
coordination. The presented analytical models are based on the assumptions of a
constant average and linearly decreasing acceleration of vehicles when moving
from the stop line of the intersection. As a tool for comparing analytical
models with the real characteristics of the transport process, it is proposed
to use the traffic micromodeling tool – PTV VISSIM. The developed plan of the simulation experiment
is to determine the advance time of the traffic signal in coordination and
consider the specific conditions of the transport process for the selected
object of study. It is the basis for obtaining the starting values of the
advance time.
Keywords: advance
time, coordination plan, progression, traffic management
1.
INTRODUCTION
Efficient traffic management (TM) in cities is
a subject of constant attention from state authorities, local governments, and
specialists (experts). The key and most numerous elements of urban TM systems
are single-level street intersections, which concentrate on the main traffic
management problems, as they cannot provide opportunities for simultaneous
movement of all competing traffic and pedestrian flows [1]. Traffic lights are
the primary means of traffic control at the busiest street intersections.
Suppose the traffic lights are located close to each other. In that case, it is
an effective practice to introduce the coordinated operation of such traffic
lights to organize the most unhindered movement of vehicles in one or more
directions of traffic – the progression.
It should be noted that the existing
coordination methods must consider the transport process peculiarities when
road users move along arterial roads thoroughly. Such features include group
arrival of vehicles to the next intersection in the coordination plan (CP),
interaction of the main traffic flow (TF) with vehicles of minor directions
that become obstacles, harmonization of vehicle speed on coordinated arterial
sections, etc. Considering these features will allow the specialists in TM to
create new approaches to CP formation, which can lead to the uniform movement
of all participants in the transport process on coordinated arterial sections.
The advance time of the green traffic signal is
one of the most critical parameters affecting the efficiency of coordinated
traffic signal control. It ensures the continuous movement of the progression
platoon on coordinated sections of the road network (RN). The advance time is
the time that allows the first vehicle in the queue to move at the selected
promotion speed to reach the last vehicle in the queue when the latter reaches
the promotion speed. The position of the last vehicle in the queue at the next
intersection may be different, and it determines the time from the green traffic
signal to the moment when this vehicle reaches the intersection speed.
Therefore, the advance time required to ensure unhindered progress depends
mainly on the number of additional vehicles in each lane of the coordinated
arterial.
The high relevance of the task of finding the
optimal values of the advance time in the operation of coordinated traffic
signal systems at the arterials is that it is taken into account in:
- the traffic light cycle length. This time is added to
the primary traffic light cycle, forming the actual cycle length. This is
necessary for the additional vehicle to accelerate to the progression platoon
speed behind the traffic signal (TS). Including the advance time in the cycle
will reduce the capacity of the coordinated intersection, as it will be free of
vehicles for most of the advance time. However, conventional methods for
calculating cycle length do not consider advance time based on a constant
saturation flow. This indicates the practicality of considering other methods
of determining the cycle length than those based on the generally accepted
Webster's formula;
- the offset time of the beginning of the traffic light
cycle. The offset time is the interval between the moment when the permissive
signal for the progression platoon is switched on at the current and previous
intersections in coordination. And since the start of the cycle in coordination
is usually the beginning of the primary cycle assigned to the progression, it
also determines the difference between the cycle start times at these
intersections. This offset is essential for optimizing the operation of
traffic signal systems, affecting the smoothness of traffic flow, reducing
congestion, and improving the distribution of traffic at intersections and
arterial sections.
The primary goal of the study is to evaluate
the accuracy of previously developed analytical models that allow for
establishing the advance time value for turning on the green traffic signal at
the next intersection in the CP.
Since such an evaluation requires the creation
of rather specific conditions for conducting the experiment, which is extremely
rare in the actual transport process, it is necessary to use microsimulation of
traffic flow on a coordinated arterial section to achieve the goal. The tool for
developing the simulation model is the specialized software product PTV VISSIM,
which has all the necessary capabilities to obtain reliable results for
modeling the selected object of experimental research.
2. MATERIALS
2.1. Introducing the analytical models to be
evaluated
In this study, we evaluate two
analytical models for determining the advance time for switching on the
permissive traffic signal in a CP based on the following:
- the average acceleration of the first vehicle in the
progression platoon from the stop line of the first intersection in the CP [2];
- the linearly decreasing nature of the change in
vehicle acceleration when the vehicle moves from a stop line [3].
According to [2], the advance time
at the next coordinated intersection at constant acceleration is calculated
according to the following dependence:
![]() , (1)
, (1)
where V is the speed of the progression
platoon, [m/s]; а is the average acceleration of the first vehicle in the platoon, [m/s2];
L is the average length of the additional vehicle, [m]; Ts
is the safety interval, i.e., the time interval required to cover the safety
distance at the current speed, [s].
The model of linearly decreasing
acceleration is an attempt to describe the acceleration patterns of vehicles
more adequately than constant acceleration. According to the research of G.
Long [3], for drivers with a moderate driving style, it looks like this:
![]() , (2)
, (2)
where а(t) is the speed of the vehicle at time t,
[m/s2]; A is the maximum acceleration of the vehicle when
starting from a stop line, [m/s2]; v(t) is the speed
of the vehicle at a given time t, [m/s]; b is a parameter that
takes a negative value and represents the rate of decrease in acceleration with
increasing speed, [s-1].
By analogy with dependence (1) and
subject to the appropriate mathematical operations, the dependence for
determining the advance time, taking into account the linearly decreasing
nature of the acceleration, will be as follows:
![]() . (3)
. (3)
Taking into account the previously
obtained results [2] of estimating the lower limit of the advance time for two
developed models for one additional vehicle that impedes the movement of a
progression platoon, it was found that the value of the advance time of
switching on the green traffic signal at the next coordinated intersection will
depend on both the characteristics of the arterial section and the
characteristics of the vehicles moving along it. Thus, the first one includes
the length of the arterial section between the TS in the CP, the number of
traffic lanes on the section, etc., and the second ones include the magnitude
and nature of the change in the acceleration of the vehicle when starting from
a stop line, speed, etc.
2.2. Description of the object of
experimental research
Since
this study makes only the first attempt to estimate the advance time on the
example of the impact of one additional vehicle on the progression platoon, it
is advisable to choose a single-lane section of the arterial with two
controlled intersections equipped with traffic lights as the object for the
experimental research. This will allow us to analyze in detail the impact of an
additional vehicle on the movement of the progression platoon on the
coordinated section of the arterial, without the mutual influence of vehicles
from the progression platoon that could move along other arterial lanes. The
arterial section (before the second intersection) also allows for entering
additional vehicles moving in the same direction as the main flow (progression
platoon). The scheme of the object of experimental research is shown in Fig. 1.

Symbols:
L is
the distance between the stop lines of intersection 1 and 2, m; l is the
distance between the place where additional vehicles enter the arterial
section, and the stop line of intersection 2, m; А and B are, respectively, the locations of the stop
lines of intersection 1 and 2; C is the control point for measuring the travel
time of progression platoon
Fig.
1. Scheme of the arterial section for the experiment in VISSIM
2.3. Justification of the range of changes in
the length of the arterial section between the TSs for the simulation
experiment
It should be noted that within this
part of the experimental research, even before the actual modeling of vehicle
movement, one of the issues that have not been fully resolved is the justification
of the range of changes in the length of the arterial section between traffic
lights (intersections) 1 and 2 (Fig. 1). In this regard, it is worth noting
that researchers on the organization of coordinated traffic signal systems have
different opinions on their effective placement relative to each other. For
example, [4] notes that there is no universal formal rule for the minimum
distance between adjacent intersections in a CP, and the authors of [5] state
that the optimal distance between controlled intersections depends on the
speed, intensity of traffic flow, and planning characteristics of the
intersection.
Basic information on the issue of
justifying the distances between the TSs is in the guidelines on TM, as well as
scientific reports and articles, the brief results of which are given in Tab.
1.
Tab. 1
Results of the analysis of sources on selection and justification of the
length of
arterial sections between TSs in the CP
|
Source |
Length between TSs |
Comments |
|
Austroads 2019 [6] |
Over 1 km |
Coordination is beneficial when TSs are installed at consecutive
intersections |
|
Bastable [7] |
Less than 500 m |
At this distance between TSs, the reduction in delays and stopping
times is usually greater than 20% |
|
The Metropolitan Planning Organization [7] |
2640 ft ≈ 800 m (ideal distance) 1600 m or more (arterial-arterial) 800 m and more (arterial-non-arterial) |
When the distance between TSs is less than a quarter mile (1320 ft
≈ 400 m), traffic flow along the arterial may be disrupted |
|
CPPAS [8], NASEM
2014 [10] |
At least 800 m |
Considered traffic levels on the arterial |
|
CEREMA 2002 [4] |
Minimum distance of 250 m |
This distance may be acceptable if the section's characteristics allow
the progression platoon to move without obstacles |
|
FHWA 2013 [11] |
More than 300 m |
Smaller distance between TSs does not contribute to the coordination
effect |
|
FHWA 2005 [12] |
1200 m |
When the TSs are placed at this distance, coordination is particularly
effective |
|
Roiko Y., Grytsun
O. [13], Khitrov І., et al. [14] |
Not more than 800 m |
At a distance of more than 800 m, the progression platoon breaks up |
|
Kondrashova V.D.
[15] |
Not more than1000 m |
When introducing arterial coordination |
|
NCHRP 1999 [16] |
330 m (cycle length is 60-70 s) More than 600 m (cycle length is more than |
Assuming the speed of a progression platoon is 50 km/h, it is assumed
that each additional TS (more than two per mile) leads to a 7% increase in
travel time |
|
LRAS [17] |
600 m |
This distance between TSs ensures almost optimal mobility during peak
loads in conditions associated with high TF |
|
Jiawen Wang et al. [18] |
The average distance is 189 m |
The paper considers optimizing traffic and pedestrian flows at
intersections close to each other. An optimization model of delays is built,
significantly reducing vehicle and pedestrian delays |
|
Nesheli M.M. et al. [19] |
780 m |
TRANSYT7F simulation results show that after coordination, delays,
travel times, and congestion are reduced |
The results of the analysis of
regulatory and scientific sources on the issue of determining the effective
distance between TSs in a CP indicate that the primary influence on the length
of arterial sections in coordination is exerted by intensity, TF speed, and
cycle length - this is, to a greater extent, under the formation of a new RN
and the functioning of the existing one. This raises the question, “What should
be done when the road network is already in place, and is it necessary to solve
traffic congestion problems on the genuine arterial?” In this case, it is
advisable to use traffic micromodeling tools, which
indicate the possibility of obtaining an effect even for objects where the TSs
are very close [20-22]. However, it should be noted that the results obtained
in these studies need to be thoroughly tested on natural objects.
In addition, it is also worth noting
that there is a significant difference in the evaluation of the limit values of
the range of changes in the length of arterial sections in the CP by Ukrainian
(300-400 m) and foreign (600 m Europe (with exceptions), 800-1200 m USA, Australia)
researchers. The main reason is the existing planning characteristics of RN
elements and city transport planning approaches.
Considering the above information,
analyzing examples of CP implementation in Ukrainian cities would be advisable
to obtain more precise limits of the range of changes in distances between the
TSs.
Turning our attention to the
sections of the Ukrainian cities' arterials where coordination has been
implemented, or attempts have been made to implement it, it should be noted
that the distances between regulated intersections in the CP differ
significantly from those indicated in the above foreign sources. For example,
in Rivne, on the section along Myru Avenue, the
average length of the section between the traffic signals in the CP is about
245 m; in Kharkiv, on Nauky
Avenue, 348 m; in Dnipro, on Naberezhna Peremohy Street, 421 m; in Chernihiv, on Heroiv Chornobylia Street, 372 m;
in Vinnytsia, on three main streets: Kyivska (9 TSs), Bratslavska (5 TSs) and Nemyrovske Highway (8 TSs) – 456 m.
To obtain more precise guidelines
for the limits of the range of possible distances between the TSs of already
implemented CPs in Ukrainian cities, we will conduct a statistical analysis of
the above information on the lengths of arterial sections between TSs in CPs,
which was expanded by using data obtained from the Kharkiv-Signal utility
company, whose specialists solve the issues of traffic regulation in Kharkiv
city.
The input information processing
provided a data set consisting of 66 values of the lengths of the sections
between the TSs. After statistical processing in STATISTICA 10, the variation
series' main characteristics were determined and presented in Tab. 2.
The obtained results do not provide
an unambiguous answer about the limit values of the range of changes in the
lengths of sections between the TS in the CP, which can be used for the
simulation experiment. However, taking into account the authors' practical
experience in the development of CP, as well as the results of the analysis of
scientific and practical works, which present data on the selection and
justification of the length of sections between controlled intersections, it
can be noted that the upper limit of the search range can be selected at 800 m,
as the one at which the progression platoon is likely to scatter. As for the
search for the lower limit of the range, it is necessary to note the
practicality of using such a characteristic of the variation series as the
mode. Unlike static (simple) averages, which are essentially an abstract
characteristic of a set, mode is a specific value that coincides with certain
variants of the set components and reflects the fundamental nature of a random
variable.
The results of the statistical
analysis of the variation series do not give an unambiguous answer regarding
the specific mode value in the data sample, so it is advisable to determine it
by the distribution of the lengths of the sections between the TSs on the
arterial. In this case, at the first stage, it is advisable to determine the
required number of intervals for which the well-known Sturges formula is used
[23]. With a sample size of 66 units, we obtain a value of the number of
intervals equal to 8. For this number of intervals of the available variation
series, the distribution of the lengths of the sections between the TSs on the
arterial was constructed using STATISTICA 10 (Fig. 2).
Tab. 2
Characteristics of the variation series of values of the lengths of
sections between the TSs on the arterial
|
Sample characteristics |
Values |
|
Sample size, [units] |
66 |
|
The
minimum value of the distance between the TSs, [m] |
153 |
|
The
maximum value of the distance between the TSs, [m] |
1055 |
|
The
average value of the distance between the TSs, [m] |
459.3 |
|
Standard deviation, [m] |
210.4 |
|
Mode, [m] |
several with a frequency of 2 290; 286; 431; 530 |
|
Median, [m] |
409.5 |
To determine the value of the mode,
we will use formula (4) and simultaneously make a graphical visualization
of the calculation of this indicator (Fig. 2).
![]() (4)
(4)
where ![]() is the lower boundary of the modal interval,
[m];
is the lower boundary of the modal interval,
[m]; ![]() is the width of the modal interval, [m];
is the width of the modal interval, [m]; ![]() is the frequency of the modal interval,
[units];
is the frequency of the modal interval,
[units]; ![]() ,
, ![]() is the frequency of the previous and next
interval relative to the modal interval, [units].
is the frequency of the previous and next
interval relative to the modal interval, [units].
![]() m
m
The obtained mode value may
correspond to the lower boundary of the range of changes in the lengths of
sections between the TSs on the arterial, which will
be used for the simulation experiment in VISSIM.
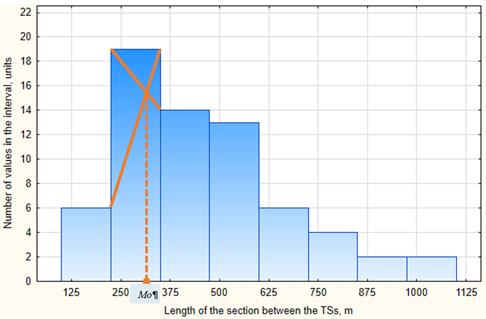
Fig. 2. Distribution of the values
of the lengths of
the sections between TSs on the arterial by intervals
Based on the above information, it
is quite possible to state that for experimental studies of models for
calculating the advance time of the permissive signal inclusion at the next
controlled intersection in the PC, it is advisable to use the range of changes
in the length of the sections between two adjacent TSs within 300-800 m with a
change step of 100 m. It should be noted that the lower limit of this range
corresponds to the current situation with the location of TSs on the arterial
sections of Ukrainian cities where coordination has been implemented, and the
upper limit of 800 m is taken as the one beyond which a platoon in the CP is
likely to scatter.
2.4. Description of the sequence of vehicle
movement modeling on the selected object
Finding the optimal advance time
values is a relatively specific task, characterized by the influence of many
random factors: the nature of the vehicle acceleration, vehicle speed, driver
behavior and reaction, traffic situation, etc. Besides, there is a need for
practical and thorough methods for its determination and consideration when
determining the cycle length in the CP. Currently, the leading practice for
verifying and testing the results of CP implementation is micro-simulation
tools, which, unfortunately, do not have appropriate tools for directly
determining the advance time, including VISSIM software. Therefore, to
determine the advance time, it is necessary to create specific conditions for
vehicle movement on the arterial section in VISSIM, which will be described
below.
The general process of model
formation in VISSIM consists of the following steps:
- RN segments modeling;
- TS placement and modeling;
- modeling of incoming flows (intensity, composition of
vehicles, and flow distribution by directions are set);
- modeling of vehicle routes;
- modeling of conflict zones with an indication of
priority rules;
- simulation of vehicle movement itself.
Simulating the movement of vehicles
in the model implies that the progression platoon starts from the stop line of
intersection 1 and drives to control point B at intersection 2, where one
additional vehicle is waiting for them each time.
The control point C is located so
far from B that, with the maximum advance time and any length of the А-B section, the vehicle starting
from the stop line of the 1st intersection does not overtake the additional
vehicle, and the additional vehicle passes point C, at its maximum (cruising)
speed. The distance traveled by the additional vehicle from the stop line of
intersection 2 to point C does not depend on the length of section А-B. The length of sections B-C will
depend on the power characteristics of the additional vehicle, the driver's
behavior, and the advance time value for the traffic signal at intersection 2.
The interest in knowing the length of sections B-C from the point of view of
the simulation experiment is that it is possible to track the merging point of
the progression platoon and the additional vehicle at different advance time
values in each series of experiments.
An additional vehicle can appear on
the arterial by creating a minor road in VISSIM 100 m from intersection 2. The
distance is optional in this case; the main thing is that by the time the
vehicles from the progression platoon approached the second intersection, the
additional vehicle was in a static position in front of the stop line of the
second intersection. The appearance of additional vehicles on the arterial and
their number are regulated by the TS, which is set when the additional vehicle
leaves the minor road.
The parameters that vary in the
simulation model are the length of the section between TSs A-B (it varies from
300 m to 800 m in increments of 100 m), the advance time of the permissive
signal activation at intersection 2 (it varies from 0 s to 10 s), and the
Random seed increment (a VISSIM setting that affects the formation of the
composition and interval of the traffic flow in the simulation model).
The sequence of simulating vehicle
movement in the developed model is as follows:
(1) At the first stage, the basic settings of the model
are carried out: the parameters of the TS operation (the length of cycle, its
intermediate and primary cycles) at intersections 1 and 2, as well as on the
minor road for allowing the additional vehicles enter the arterial are
determined; the parameters of the vehicles moving along the coordinated section
of the arterial and the minor road are selected; the vehicle movement model
(driving style) is determined, which ensures uniform movement of the
progression platoon when they reach their cruising speed in the simulation (in
this experiment, the Wiedemann 99 model is used). The secondary direction is
configured so that only one additional vehicle is allowed to pass the traffic
lights. The speed limits respond to the conditions of vehicle movement in urban
areas.
(2) In the second stage, the progression platoon movement
is modeled under the conditions of its free movement (unhindered movement of
the progression platoon through the section between intersections 1 and 2 after
starting from the stop line of intersection 1). The obtained value of the
movement time through the A-B section is used to set the TS at intersection 1
as the advance time of the traffic signal activation at Intersection 1. The vehicle's
maximum speed through the section and its acceleration when starting from the
stop line of intersection 1 are also recorded.
(3) At the third stage, the simulation of the movement of
the progression platoon through the coordinated section of the arterial, which
meets an additional vehicle near the stop line of intersection 2, is carried
out when different advance time values of the traffic signal activation at
intersection 2 are set. At the same time, the travel time of the progression
platoon through sections А-B and A-C is recorded. In each series of experiments, one value of the
advance time is chosen that corresponds to the minimum value of the time for
overcoming section А-B by vehicles
from the progression platoon, that is, under conditions of unhindered movement
through the section (when coordinated cars do not slow down on the approach to
intersection 2).
3. DISCUSSION
The following factors should be considered when
searching for the optimal value of the advance time: length of the section between
traffic lights. The longer the section is, the longer the advance time should
be, as well as vehicle speed (power characteristics of vehicles). The higher
the speed of vehicles is, the shorter the vehicle's time should be and the
intensity of the traffic. If the traffic intensity is high, the vehicle's time
should also be longer to ensure all vehicles in the progression platoon can
pass through the first TS before closing.
Regarding the lengths between the TSs in the CP, it is
crucial to consider the advance parameter, as it has a critical impact on
increasing the cycle length of the traffic lights. This is because the vehicles
at the first TS need enough time to pass through the section before the red
signal at the second TS turns on. If the advance time is insufficient, the
first vehicles in the progression platoon may hit an additional vehicle or get
stuck at a red signal at the second TS, resulting in delays.
4. CONCLUSIONS
The advance time of the TS's
previous activation is an essential parameter for setting up effective TS
management in coordinated arterial sections. Its use allows for unhindered
movement of the progression platoon. The current TM guidelines do not contain
information on the selection and justification of the advance time value, but
only provide some recommendations for determining the offset value of the
traffic signal activation at the next intersection in the CP without specifying
the advance time.
Finding the advance time is quite
specific. Its solution requires creating special conditions for the movement of
vehicles on the object selected for the study, which is almost impossible to
reproduce and provide on an actual section of the road network. Therefore, it
is advisable to use traffic micro modeling tools, such as VISSIM, as the
primary tool for modeling the advanced time.
Acknowledgment
The research was partially supported by EU NextGenerationEU through the Recovery and Resilience Plan
for Slovakia under project No. 09I03–03-V01–00094, The NAWA Ulam Programme (grant number BPN/ULM/2022/1/00045), and International Association for
Technological Development and Innovations.
References
1.
Olha Bieletska, Yevhen Liubyi, Serhii
Ocheretenko, Dmitriy Muzylyov, Vitalii Ivanov, Ivan Pavlenko. 2023. „Approach
to Determine Transport Delays at Unsignalized Intersections”. Communications
- Scientific Letters of the University of Zilina 25(3): A124-A136. p-ISSN:
1335-4205. e-ISSN: 2585-7878. DOI: 10.26552/com.C.2023.052.
2.
Петро
Горбачов,
Євген Любий. 2022. „Методика
оцінки часу,
необхідного
для
забезпечення
рівномірного
руху пачки
автомобілів
на координованій
ділянці
міської
магістралі”.
Автомобіль
і
електроніка.
Сучасні
технології 22:
81-91. [In Ukrainian: Peter Horbachov, Yevhen Liubyi.
2022. „Method of estimating the time required to ensure the uniform motion of
vehicle platoon progression on the coordinated section of the city arterial
road”. Vehicle and Electronics. Innovative Technologies 22: 81-91]. ISSN:
2226-9266. DOI: 10.30977/VEIT.2022.22.0.2.
3.
Gary Long. 2000. „Acceleration
Characteristics of Starting Vehicles”. Transportation Research Record
1737(1): 58-70. ISSN: 0361-1981. DOI: 10.3141/1737-08.
4.
CEREMA. 2002. The design of interurban
intersections on major roads. Bagneux Cedex: Centre
de la Sécurité et des Techniques Routières. ISBN:
2-11-085847-8.
5.
Tien Fang Fwa. 2005. The Handbook of
Highway Engineering. London: CRC Press. ISBN-10: 0849319862.
ISBN-13: 978-0849319860.
6.
Austroads. 2019. Guide to Traffic
Management Part 9: Traffic Operations. Sydney: Austroads. ISBN:
978-1-925854-06-0.
7.
AJ Bastable. 1980. „The
economic and social impact of dynamic signal coordination in Sydney”. In: X
Australian Road Research Board Conference 10(4):
245-251. Australian Road Research Board, Vermont South Australia.
8.
Genesee transportation council The
Metropolitan Planning Organization for the Genesee-Finger Lakes Region.
„Intersection Spacing and Traffic Signal Spacing”. Available at:
https://www.gtcmpo.org/sites/default/files/pdf/2007/IntersectionSpacing-TrafficSignalSpacing.pdf.
9.
Weld County Government. „Access Control
Plan for I-25 Parallel Arterial Study”. Available at:
https://www.weld.gov/files/sharedassets/public/v/2/departments/public-works/documents/nipa-access-control-plan-memo-051320.pdf
10. NASEM.
2014. Access Management Manual. Washington, DC: The National Academies
Press. ISBN: 978-0-309-29541-3. DOI: 10.17226/27823.
11. FHWA
Safety Program. 2013. Signalized Intersections Informational Guide.
Second Edition. Report No. FHWA-SA-13-027. Washington, DC: USDOT.
12. FHWA.
2005. Signal Timing on a Shoestring. Report No. FHWA-HOP-07-006.
Washington, DC: USDepartment of Transportation Federal Highway Administration.
13. Юрій
Ройко, Олег
Грицунь. 2014
“Підвищення
ефективності
функціонування
ділянок
вулично-дорожньої
мережі в
умовах
координованого
регулювання”.
Наукові
нотатки 45: 472-476. [In Ukrainian: Yuri Royko, Oleg Grytsun. 2014. “Increasing
efficiency of road network links operating in coordinate controlling conditions”. Scientific
Notes 45: 472-476]. ISSN: 978-617-672-039-3.
14. Ігор
Хітров, Олег
Цьонь,
Михайло
Кристопчук,
Олег
Почужевський.
2021. “Аналіз
транспортних
затримок в
центральній
частині
міста та шляхи
їх зниження”. Вісник
машинобудування
та
транспорту
2(14): 131-139. [In Ukrainian: Igor Khitrov, Oleg Tson,
Mykhailo Krystopchuk, Oleg Pochuzhevskiy. 2021. “Analysis of transport delays
in the central part of the city and ways to reduce them”. Journal of Mechanical
Engineering and Transport 2(14): 131-139]. ISSN:
2415-3486. DOI: 10.31649/2413-4503-2021-14-2-131-139.
15. KNAME. „Магістральне
управління
транспортних
потоків”. [In Ukrainian: “Trunk traffic flow management”]. Available at:
https://eprints.kname.edu.ua/52334/1/%D1%871-161-163.pdf.
16. NCHRP.
1999. Impacts of Access Management Techniques. NCHRP Report 420.
Washington, DC: Transportation Research Board, National Academy Press.
17. Lynnwood
Road Arterial Study. „The effect of intersection spacing on arterial
operation”. Available at:
https://repository.up.ac.za/bitstream/handle/2263/8258/95%20Joubert.pdf?sequence=1&isAllowed=y.
18. Jiawen Wang, Hao Chen, Jiayu Hang, Mingjie Xu, Yin Han. 2023. „A Signal Optimization Model of
Adjacent Closely Spaced Intersections Which Optimizes Pedestrian Crossing”. Journal
of Advanced Transportation 2023, Article ID 3964616. ISSN:2042-3195. DOI: 10.1155/2023/3964616.
19. Mahmood
Mahmoodi Nesheli, Othman Che Puan, Arash Moradkhani Roshandeh. 2009.
„Optimization of Traffic Signal Coordination System on Congestion: A Case
Study”. Wseas Transactions on Advances in
Engineering Education 6(7): 203-212.
20. Yuanyang
Zou, Renhuai Liu, Ya Li, Yingshuang Ma, Guoxin Wang. 2021. „Signal adaptive
cooperative control of two adjacent traffic intersections using a two-stage
algorithm”. Expert Systems with Applications 174: 114746. ISSN:
0957-4174. DOI: 10.1016/j.eswa.2021.114746.
21. Xueyao Ma, Fenglin Hu, Yong Qi, Weibin
Zhang. 2022.
„Optimization of Signal Timing Coordination
at Short-spaced Intersections”. In: 34th Chinese Control and Decision
Conference (CCDC): 2721-2726. Hefei, China. DOI: 10.1109/CCDC55256.2022.10033746.
22. Qichao
Wang, Joseph Severino, Juliette Ugirumurera, Wesley Jones, Jibonananda Sanyal.
2021. „Offline Arterial Signal Timing Optimization for Closely Spaced
Intersections”. In 2021 IEEE Green
Technologies Conference (GreenTech): 344-350. Denver, CO, USA. DOI:
10.1109/GreenTech48523.2021.00062.
23. Herbert
Sturges. 1926. „The Choice of a Class Interval”. Journal of the American
Statistical Association 21(153): 65-66. Available at: https://www.jstor.org/stable/2965501.
Received 03.09.2024; accepted in
revised form 30.11.2024
![]()
Scientific Journal of Silesian University of Technology. Series
Transport is licensed under a Creative Commons Attribution 4.0
International License