Article citation information:
Marcisz, M., Kozuba, J., Ulman, K. Development directions of energy sources for unmanned aerial vehicle (UAV). Scientific Journal of Silesian University of Technology. Series Transport. 2024, 125, 177-189. ISSN: 0209-3324. DOI: https://doi.org/10.20858/sjsutst.2024.125.12.
Marek
MARCISZ[1], Jarosław KOZUBA[2], Kamil ULMAN[3]
DEVELOPMENT
DIRECTIONS OF ENERGY SOURCES FOR UNMANNED AERIAL VEHICLE (UAV)
Summary. The aim of the research
was to conduct a comprehensive analysis of various energy sources used in
unmanned aerial vehicles (UAVs) and to determine which implemented energy
sources are the best as well as what are the directions of energy source
development. One hundred drone models were selected for the study, differing in
their installed energy source, flight time, payload capacity, own weight, and
application. The analyzed UAVs were powered by 6 energy sources: lithium
polymer and lithium-ion batteries, combustion engines, hybrid drives, hydrogen
fuel cells, and solar energy. The analysis covered both technical and
economic, environmental, and operational aspects influencing the choice of a
specific energy source. It allowed determining the best energy source for each
of the 4 selected applications: military, monitoring, transport, and
agriculture. An assessment of challenges related to the use and development of
energy sources was also carried out, and areas where further research and
innovation are necessary and essential were identified. It was found that in
military applications, the development of UAV energy sources will focus on
combustion engines and electric propulsion with lithium polymer batteries. In
civilian applications (in transport, monitoring, and agriculture), it will be
directed towards further research and improvement of hybrid drives and hydrogen
fuel cells.
Keywords: unmanned aerial vehicles, energy sources,
lithium polymer batteries, hybrid drives, hydrogen fuel cells, solar energy
1. INTRODUCTION
The market for unmanned aerial
vehicles (UAVs or drones) is developing rapidly and in an extremely dynamic
manner, driven by their increasing popularity. It is one of the fastest-growing
areas of technology, representing one of the most important and promising areas
of aerospace engineering development. In a rapidly evolving world,
technological progress has enabled the development of unmanned systems, and the
demand for UAVs and their scope of application continues to grow, making them
standard research platforms that have reached a level of practical reliability
and functionality. The utilization of advanced emerging technologies, such as
unmanned aerial systems, undoubtedly provides an alternative to traditional
methods widely used in various industries and sectors of the economy. Since
their introduction to the market, UAVs have revolutionized many fields and find
application in all kinds of unconventional tasks. Often, their use proves to be
the only method of measurement, especially in cases where human intervention
entails high risk or is simply impossible [9]. However, in all of these
undeniably significant possibilities for drone usage, there arises a
considerably limiting factor: their operational time and associated range, and
subsequently, their operational scope. Therefore, one of the key challenges
facing the development of unmanned aviation technologies is the issue of energy
sources implemented on drones, which directly affects the value of the
aforementioned parameters. Contemporary UAVs are equipped with various energy
sources, including lithium polymer batteries (Li-Po), lithium-ion batteries
(Li-Ion), combustion engines (gasoline, turboprop, diesel, and turbojet),
hybrid technologies (hybrid fuel cells: two-stroke engine + Li-Po batteries),
hydrogen fuel cells, solar panels, or even technologies allowing drones to be
charged using lasers from very long distances. Therefore, choosing the right
energy source is crucial to achieve optimal performance, flight time, and drone
range, and growing expectations in this regard necessitate continuous
development and optimization of existing technologies as well as the search for
new, innovative solutions in the field of energy sources for UAVs. The aim of
the research was to analyze various energy sources used in unmanned aerial
vehicles (UAVs) and to identify challenges associated with their utilization
and development, as well as to identify areas where further research and
innovations are necessary. A detailed analysis of the advantages and
limitations of each energy source provided comprehensive knowledge on the
selection and optimization of energy sources in UAVs, thereby supporting
engineers and designers in creating more efficient and sustainable solutions
for the future of unmanned aviation.
2. ENERGY REQUIREMENTS AND TYPES OF ENERGY
SOURCES IN UAV
Unmanned aerial vehicles consume
significant amounts of energy to sustain flight, making the selection of the
appropriate energy source one of the most crucial aspects of drone technology.
An ideal energy source should be characterized by: low weight, high nominal
capacity or high calorific value, ease, and speed of replacing depleted
cells/fuel, resistance to variable atmospheric conditions, and relatively low
cost. Providing a clear indication of an energy source that can simultaneously
fulfill all the aforementioned characteristics is nearly impossible. Therefore,
there is a need for compromise to determine which of these characteristics is
most crucial. The efficiency of an energy source also depends on factors
related to the construction of the drone, the propulsion system used, as well
as the flight time. The primary factors influencing energy consumption in
unmanned aerial vehicles include: mass and aerodynamics, construction and type of
propulsion system (multirotor or fixed-wing with a design similar to an
airplane), batteries and energy storage methods, control systems, and flight
environment. The energy requirements of UAVs also define their purpose in terms
of utilization across various industries and sectors of the economy. Drones
were originally intended primarily for military use. It was only much later
that they began to be slowly introduced for civilian use. Military applications
of drones mainly include: troop protection (such as gathering information using
methods like “hover and stare” or “perch and stare”), mine detection, transport
(moving goods within and beyond the battlefield), artillery support (accurate
and swift enemy position locating), special forces operations support (a
crucial element of reconnaissance and intelligence), and strike missions.
Solutions used in military UAVs are often adapted in drone models for civilian
use. In everyday life, drones find their widest application in various forms of
monitoring (including inspection), transport, and agriculture (primarily in
precision agriculture). The drone market offers various power sources for UAVs,
where the value of most of them is determined by power density (referring to
the amount of energy the source can deliver at a given moment) and energy
density (referring to the energy that can be stored in the source, i.e., how
long such an amount of energy can be supplied), as illustrated by the Ragone
plot (Fig. 1) [1].
|
|
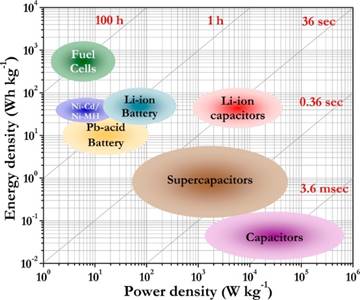
Fig. 1. Ragone plot [1]
During the conducted research, some
of the sources were rejected due to their excessive own weight, excessive size
(limiting operational capabilities), or insufficient energy capacity. Given the
mentioned characteristics, particular attention, in the form of energy sources
for UAVs, deserves:
·
batteries (along with all their
advantages, but also drawbacks): lead-acid (Pb-Acid), nickel-cadmium (NiCad),
nickel-metal-hydride (NiMH), alkaline, lithium-polymer (Li-Po), lithium-ion
(Li-Ion), zinc-air (Zn-O2), lithium-air (Li-Air), lithium-thionyl
chloride (Li-SOCl2) [3, 8, 9, 12];
·
internal combustion engines: piston,
turbine, jet;
·
hybrid drives, constituting a complex
combination of the benefits of combustion and electric propulsion, while
simultaneously eliminating their unfavorable characteristics [5, 12];
·
fuel cells (FC), serving as a form of
alternative energy sources: Alkaline FC (AFC), Proton Exchange Membrane
(PEMFC), Phosphoric Acid FC (PAFC), High-Temperature FC (HTFC) [2, 4, 6, 9-12];
·
solar cells, based on two technologies: PV
system (utilizing the photovoltaic effect, involving the direct conversion of
solar radiation) or CSP system (based on concentrated solar power, using water
vapor to drive turbines generating electricity) [7].
3. METHOD
The research was conducted
based on a comparison of 100 selected drone models, differing in their
implemented energy source, maximum flight time, maximum payload, own weight,
and application (Tab. 1).
Tab. 1
Characteristics of the analyzed UAV models
|
No. |
Model |
Energy source |
Time of flight [min] |
Weight [kg] |
Payload [kg] |
Application |
|
1 |
Autel Evo Nano + |
Li-Polymer |
28 |
0,249 |
0 |
monitoring |
|
2 |
Parrot Anafi SE |
Li-Polymer |
32 |
0,5 |
0 |
monitoring |
|
3 |
SG V100 |
Li-Polymer |
180 |
10 |
5 |
monitoring |
|
4 |
Fixar 007 |
Li-Polymer |
60 |
5 |
2 |
monitoring |
|
5 |
L10 Pro |
Li-Polymer |
26 |
18,3 |
10,7 |
agriculture |
|
6 |
XAG P100 |
Li-Polymer |
17 |
51,5 |
40 |
agriculture |
|
7 |
PH-20 |
Li-Polymer |
70 |
19,2 |
10 |
transport |
|
8 |
SG M300 |
Li-Polymer |
80 |
10,7 |
8 |
transport |
|
9 |
SG M600 |
Li-Polymer |
60 |
23 |
22 |
transport |
|
10 |
Bayraktar Mini |
Li-Polymer |
120 |
4,5 |
0 |
military |
|
11 |
DeltaQuad Pro |
Li-Polymer |
110 |
5 |
1,2 |
military |
|
12 |
Eleron 3 |
Li-Polymer |
90 |
4,5 |
1 |
military |
|
13 |
EOS C-VTOL Magyla |
Li-Polymer |
180 |
14,2 |
1,1 |
military |
|
14 |
FlyEye |
Li-Polymer |
240 |
12 |
0 |
military |
|
15 |
Lastochka-M |
Li-Polymer |
120 |
5,3 |
0,35 |
military |
|
16 |
Leleka-100 |
Li-Polymer |
210 |
6 |
0 |
military |
|
17 |
Malloy T150 |
Li-Polymer |
36 |
120 |
68 |
military |
|
18 |
Puma |
Li-Polymer |
330 |
10,7 |
2,5 |
military |
|
19 |
Punisher |
Li-Polymer |
90 |
6,5 |
3 |
military |
|
20 |
R-18 |
Li-Polymer |
30 |
25 |
5 |
military |
|
21 |
Revolver 860 |
Li-Polymer |
20 |
31,5 |
10,5 |
military |
|
22 |
Switchblade 600 |
Li-Polymer |
40 |
15 |
2,3 |
military |
|
23 |
Vector |
Li-Polymer |
180 |
8,5 |
0 |
military |
|
24 |
Warmate |
Li-Polymer |
50 |
4 |
1 |
military |
|
25 |
Xdynamics-Evolve |
Li-Polymer |
33 |
2 |
0 |
military |
|
26 |
ZALA KYB |
Li-Polymer |
30 |
3 |
0 |
military |
|
27 |
ZALA Lancet-3 |
Li-Polymer |
60 |
7 |
5 |
military |
|
28 |
ZALA-421 |
Li-Polymer |
90 |
1,4 |
1 |
military |
|
29 |
Matrice 600 Pro |
Li-Polymer |
35 |
10 |
6 |
monitoring |
|
30 |
Falcon 8+ |
Li-Polymer |
18 |
1,2 |
0,8 |
monitoring |
|
31 |
Matrice 300 RTK |
Li-Polymer |
55 |
6,3 |
2,5 |
monitoring |
|
32 |
Agras T30 |
Li-Polymer |
60 |
37 |
30 |
agriculture |
|
33 |
Mavic 3 Pro |
Li-Ion |
43 |
0,958 |
0 |
monitoring |
|
34 |
Inspire 3 |
Li-Ion |
28 |
4 |
0,38 |
monitoring |
|
35 |
Matrice 350 RTK |
Li-Ion |
55 |
6,47 |
0,96 |
monitoring |
|
36 |
Mavic 3 Classic |
Li-Ion |
46 |
0,895 |
0 |
monitoring |
|
37 |
Air 3 |
Li-Ion |
46 |
0,72 |
0 |
monitoring |
|
38 |
Avata |
Li-Ion |
18 |
0,41 |
0 |
monitoring |
|
39 |
Agras T10 |
Li-Ion |
60 |
16 |
10 |
|
|
40 |
UAS A1-CM Furia |
Li-Ion |
180 |
5,5 |
0 |
military |
|
41 |
CW-25 |
hybrid |
360 |
30 |
6 |
monitoring |
|
42 |
CW-80E |
hybrid |
480 |
80 |
20 |
monitoring |
|
43 |
GAIA 160HY |
hybrid |
180 |
15,5 |
3 |
monitoring |
|
44 |
H2 |
hybrid |
300 |
17 |
5 |
monitoring |
|
45 |
HAVELSAN BAHA |
hybrid |
360 |
13 |
5 |
monitoring |
|
46 |
Hybrix 2.1 |
hybrid |
240 |
13 |
5 |
monitoring |
|
47 |
Hydra-400 |
hybrid |
330 |
50 |
120 |
monitoring |
|
48 |
NOA Hybrid |
hybrid |
175 |
25 |
6 |
monitoring |
|
49 |
HF T60-H |
hybrid |
60 |
60 |
60 |
agriculture |
|
50 |
Perimeter 8 |
hybrid |
300 |
16 |
10 |
agriculture |
|
51 |
UAS-25g |
hybrid |
25 |
34 |
26 |
agriculture |
|
52 |
UAS-CTH |
hybrid |
30 |
27,8 |
32,8 |
agriculture |
|
53 |
Drone Volt Heliplane LRS 340 |
hybrid |
210 |
15 |
3 |
monitoring |
|
54 |
Anavia HT-100 |
hybrid |
250 |
55 |
65 |
transport |
|
55 |
LHD |
hybrid |
360 |
110 |
100 |
transport |
|
56 |
SG V900 |
hybrid |
210 |
60 |
40 |
transport |
|
57 |
X55 |
hybrid |
180 |
8,6 |
7,7 |
transport |
|
58 |
XER X8 Heavy |
hybrid |
210 |
25 |
7 |
transport |
|
59 |
YD6-1600L |
hybrid |
120 |
26,6 |
6,5 |
transport |
|
60 |
Yeair |
hybrid |
60 |
5 |
5 |
transport |
|
61 |
H6 Poseidon II |
hybrid |
420 |
75 |
25 |
military |
|
62 |
Lemur |
hybrid |
480 |
20 |
5 |
military |
|
63 |
Merlin-VR |
hybrid |
600 |
47 |
6,5 |
military |
|
64 |
PW-Zoom |
combustion engine |
60 |
22 |
2 |
monitoring |
|
65 |
UAS6-50g |
combustion engine |
120 |
100 |
50 |
agriculture |
|
66 |
CASC Rainbow-4 |
combustion engine |
360 |
40 |
4,5 |
military |
|
67 |
Elbit Hermes 900 |
combustion engine |
2160 |
670 |
300 |
military |
|
68 |
General Atomics Avenger |
combustion engine |
1080 |
5355 |
2900 |
military |
|
69 |
IAI Eitan |
combustion engine |
1800 |
2700 |
2700 |
military |
|
70 |
MQ-1 Predator |
combustion engine |
2040 |
512 |
386 |
military |
|
71 |
Scrab I |
combustion engine |
30 |
28 |
4 |
military |
|
72 |
PD-2 |
combustion engine |
600 |
16 |
3 |
military |
|
73 |
Forpost-R |
combustion engine |
1200 |
330 |
120 |
military |
|
74 |
Korsar |
combustion engine |
600 |
160 |
40 |
military |
|
75 |
Mohajer-6 |
combustion engine |
720 |
520 |
150 |
military |
|
76 |
MQ-Reaper |
combustion engine |
1680 |
2220 |
1360 |
military |
|
77 |
Orion |
combustion engine |
1440 |
650 |
450 |
military |
|
78 |
Orlan-10 |
combustion engine |
960 |
18 |
6 |
military |
|
79 |
Shahed 129 |
combustion engine |
1440 |
400 |
132 |
military |
|
80 |
Shahed-136 |
combustion engine |
690 |
150 |
50 |
military |
|
81 |
Ukrjet Uj-22 |
combustion engine |
420 |
50 |
20 |
military |
|
82 |
Bayraktar TB2 |
combustion engine |
1620 |
595 |
55 |
military |
|
83 |
ANNA |
hydrogen FC |
60 |
11 |
5 |
monitoring |
|
84 |
Dodeca |
hydrogen FC |
300 |
24 |
3 |
monitoring |
|
85 |
DS30W Specs |
hydrogen FC |
120 |
22 |
3 |
monitoring |
|
86 |
H100 |
hydrogen FC |
55 |
55 |
30 |
monitoring |
|
87 |
H2D200 |
hydrogen FC |
240 |
15 |
4,5 |
monitoring |
|
88 |
H2D250 |
hydrogen FC |
480 |
40 |
10 |
monitoring |
|
89 |
H2D55 |
hydrogen FC |
100 |
30 |
7 |
monitoring |
|
90 |
Hexa |
hydrogen FC |
360 |
20 |
3 |
monitoring |
|
91 |
BSHARK |
hydrogen FC |
120 |
8 |
1 |
monitoring |
|
92 |
Hydrone 1550 |
hydrogen FC |
150 |
16,5 |
2 |
monitoring |
|
93 |
Urban |
hydrogen FC |
37 |
15 |
10 |
transport |
|
94 |
Tachyon |
hydrogen FC |
120 |
20 |
5 |
military |
|
95 |
Aero Vironment Pathfinder |
solar panels |
720 |
250 |
45 |
monitoring |
|
96 |
BAE Systems PHASA-35 |
solar panels |
4320 |
150 |
15 |
monitoring |
|
97 |
Qimingxing-50 |
solar panels |
259200 |
19 |
0 |
monitoring |
|
98 |
UAVOS ApusDuo |
solar panels |
525600 |
43 |
2 |
monitoring |
|
99 |
UK OS Astigan A3 |
solar panels |
129600 |
149 |
25 |
monitoring |
|
100 |
Zephyr 8/S |
solar panels |
37440 |
65 |
5 |
monitoring |
In the analysis of energy sources
used in UAVs, four parameters of drones were taken into account as outlined in
Tab. 1, with the respective divisions:
·
energy source, with distinction:
lithium-polymer batteries (Li-Pol), lithium-ion batteries (Li-Ion), hybrid
drives, combustion engines, hydrogen fuel cells, and solar panels;
·
maximum flight time, with distinction of
the most common time intervals in drone operations: up to 60 minutes, from 61
to 180 minutes, from 181 to 360 minutes, from 361 to 600 minutes, and above 600
minutes;
·
drone's own weight, according to the
classification into classes based on the new EASA regulations for UAV
classification, effective from January 1, 2024: C0 up to 0.250 kg, C1 up to 0.9
kg, C2 up to 4 kg, C3/C4 up to 25 kg, C5/C6 up to 25 kg (differs from class
C3/C4 with additional requirements such as land mode, low-speed mode,
telemetry), above 25 kg;
·
maximum payload, with distinction of the
most commonly used categories: up to 5 kg, from 5 to 10 kg, above 10 kg;
·
application, divided into four main groups
of drone applications: military, monitoring, transport, and agriculture.
4. RESULTS
Based on the conducted analysis
(Tab. 1), it can be concluded that drones with lithium-polymer batteries are
characterized by a short flight time, low payload capacity, light weight, and
are intended for military and monitoring purposes (Fig. 2).
Drones powered by lithium-ion
batteries are characterized by short flight time, low weight, and low payload
capacity, with the majority of them finding application in the commercial
market for monitoring purposes (Tab. 1, Fig. 3).
UAVs with hybrid propulsion systems
are characterized by long flight times, large weight, and have varied payload
capacities, adapting to the tasks for which they are utilized. They find
application in every industry that utilizes drones (Tab. 1, Fig. 4).
|
a) |
b) |
|
c) |
d) |
Fig. 2. Percentage distribution of drones
powered by Li-Po batteries based on: maximum flight time (a), own weight (b),
maximum payload (c), and application (d)
|
a) |
b) |
|
c) |
d) |
Fig. 3. Percentage distribution of drones
powered by Li-Ion batteries based on: maximum flight time (a), own weight (b),
maximum payload (c), and application (d)
|
a) |
b) |
|
c) |
d) |
Fig. 4. Percentage distribution of drones
powered by hybrid drives based on: maximum flight time (a), own weight (b), maximum
payload (c), and application (d)
UAVs with combustion engine
propulsion systems are characterized by very long flight times, large weight,
and high payload capacity, making them widely used in the military as the
weapon of the 21st century (Tab. 1, Fig. 5).
|
a) |
b) |
|
c) |
d) |
Fig. 5. Percentage distribution of drones
powered by combustion engine based on: maximum flight time (a), own weight (b),
maximum payload (c), and application (d)
The majority of drones powered by
hydrogen fuel cells are characterized by a flight time of up to 180 minutes.
They typically exhibit a weight not exceeding 25 kg. The payload capacity of
these machines is relatively small, usually up to 5 kg. Most UAVs powered by
hydrogen fuel cells are used in industries related to various forms of
monitoring (Tab. 1, Fig. 6).
|
a) |
b) |
|
c) |
d) |

Fig. 6. Percentage distribution of drones
powered by hydrogen fuel cells based on: maximum flight time (a), own weight
(b), maximum payload (c), and application (d)
UAVs powered by solar panels are
characterized by a flight time exceeding 600 minutes. Manufacturers of these
drones often present the values of this parameter in days or even months,
illustrating the extent of their range. Unfortunately, they must be constantly
powered by solar panels, which requires operating at high altitudes. These
features of such UAVs primarily find their application in monitoring, often
playing the role of “satellites”. The weight of these UAVs is mostly above 25
kg, and their payload does not exceed 10 kg (Tab. 1, Fig. 7).
In the industries under analysis,
most military drones utilize a combination of two energy sources: electric
propulsion with lithium-polymer batteries and combustion propulsion. This
choice is influenced by the specific requirements of military operations and
the varied tasks assigned to drones in this sector. On the other hand, drones
used for monitoring and inspection tasks draw their energy primarily from three
sources: hydrogen fuel cells, hybrid drives, and electric drives with
lithium-polymer batteries. Hybrid propulsion systems are favored in transport
drones to handle their substantial payload capacity, while agricultural drones
also opt for hybrid systems due to their need for robust payload capacity.
|
a) |
b) |
|
c) |
d) |
Fig. 6. Percentage distribution of drones
powered by solar panels based on: maximum flight time (a), own weight (b),
maximum payload (c), and application (d)
|
a) |
b) |
|
c) |
d) |
Fig. 7. Percentage distribution of
drones based on their application in: military (a), monitoring (b), transport
(c), agriculture (d)
5. CONCLUSION
The
conducted research has provided answers to questions regarding the challenges
associated with the development of UAV energy sources and their utilization.
The results of the research have shown which aspects need to be considered in
selecting the energy source implemented in UAVs to most effectively carry out
their assigned tasks. The analysis allowed for presenting the energy
requirements of UAVs and indicating the directions in which development and
further research will progress, aiming to create the ideal and universal energy
source. Based on the conducted research, it can be concluded that in military
applications, the direction of UAV energy source development will move towards
drones with combustion and electric propulsion systems using lithium-polymer
batteries. In civilian applications, mainly involving monitoring, transport,
and agriculture, further research and improvement of UAV propulsion systems
will focus on hybrid drives and fuel cells.
References
1.
Aravindan Vanchiappan, Joe Gnanaraj,
Yun-Sung Lee, Srinivasan Madhavi, 2014. „Insertion-type electrodes for
nonaqueous Li-ion capacitors”. Chemical
Reviews 114(23):11619-35. DOI: 10.1021/cr5000915.
2.
Barreras Toledo
Félix, Antonio Lozano Fantoba, Luis Valiño García, Carlos Marín
Hernández, Antonio Pascau, 2005. „Flow distribution in a bipolar plate of a
PEM fuel cell: experiments and numerical simulation studies”. Journal of Power Sources 144(1): 54-66.
DOI: 10.1016/j.jpowsour.2004.11.066.
3.
Ci Song, Ni Lin, Dalei Wu, 2016.
„Reconfigurable battery techniques and systems: a survey”.
IEEE Access 4: 1175-1189. DOI:
10.1109/ACCESS.2016.2545338.
4.
Ganguly Saibal, Sonali Das, Kajari
Kargupta, Dipali Bannerjee, 2012. „Optimization of performance of Phosphoric
Acid Fuel Cell (PAFC) stack using reduced order model with integrated space
marching and electrolyte concentration inferencing”. Computer Aided Chemical Engineering 31: 1010-1014. DOI:
10.1016/B978-0-444-59506-5.50033-X.
5.
Gong Andrew, Rens
Macneill, Dries Verstraete, Jennifer L. Palmer, 2016. „Analysis of a
fuel-cell/battery /supercapacitor hybrid propulsion system for a UAV using a
hardware-in-the-loop flight simulator”. In: 2018
AIAA/IEEE Electric Aircraft Technologies Symposium (EATS): 1-17.
Cincinnati, OH, USA. 12-14 July 2018.
6.
Jeon Gwang-Yeon, Hong-Jun Choi, Young-Hoon
Yun, In-Su Cha, Dong-Mook Kim, Jeong-Sik Choi, Jin-Ho Jung, Jeong-Phil Yoon,
2007. „PEM (Proton Exchange Membrane) fuel cell bipolar plates”. In: 2007 International Conference on Electrical
Machines and Systems (ICEMS): 1891-1893. Seoul, Korea (South). 08-11
October 2007. DOI: 10.1109/ICEMS12746.2007.4412119.
7.
Kalogirou Soteris A. 2013. Solar Energy Engineering. Processes and
Systems. Amsterdam: Elsevier. ISBN: 978-01-239-7270-5. DOI:
10.1016/B978-0-12-374501-9.X0001-5.
8.
Karden Eckhard, Servé
Ploumen, Birger Fricke, Ted Miller, Kent Snyder. 2007. „Energy
storage devices for future hybrid electric vehicles”. Journal of Power Sources 168(1): 2-11. DOI:
10.1016/j.jpowsour.2006.10.090.
9.
Mehta Viral, Joyce Smith Cooper. 2003.
„Review and analysis of PEM fuel cell design and manufacturing”. Journal of Power Sources 114(1): 32-53.
DOI: 10.1016/S0378-7753(02)00542-6.
10. Mohammed
Osama A., David A. Lowther, Meng H. Lean, Bassem Alhalabi. 2001 „On the creation of a generalized
design optimization environment for electromagnetic devices”. IEEE
Transactions on Magnetics 37(5): 3562-3565. DOI: 10.1109/20.952662.
11. Thanomjit
Chollaphan, Yaneeporn Patcharavorachot, Amornchai Arpornwichanop. 2012. „Design and thermal analysis of a
solid oxide fuel cell system integrated with ethanol steam reforming”. Computer Aided Chemical Engineering 20:
287-291. DOI: 10.1016/B978-0-444-59519-5.50058-7.
12. Townsend
Ashleigh, Immanuel N. Jiya, Christiaan Martinson, Dmitri Bessarabov, Rupert Gouws.
2020. „A comprehensive review of energy sources for unmanned aerial vehicles,
their shortfalls and opportunities for improvements”. Heliyon 6(11): 1-9. DOI: 10.1016/j.heliyon.2020.e05285.
Received 05.06.2024; accepted in revised form 16.08.2024
![]()
Scientific
Journal of Silesian University of Technology. Series Transport is licensed
under a Creative Commons Attribution 4.0 International License