Article
citation information:
Krasuski, K., Bakuła, M. Operation and
reliability of an onboard GNSS receiver during
an in-flight test. Scientific Journal of
Silesian University of Technology. Series Transport. 2021, 111, 75-88. ISSN: 0209-3324. DOI: https://doi.org/10.20858/sjsutst.2021.111.6.
Kamil KRASUSKI[1],
Mieczysław BAKUŁA[2]
OPERATION
AND RELIABILITY OF AN ONBOARD GNSS RECEIVER DURING AN IN-FLIGHT TEST
Summary. This article presents and describes the operational
capabilities of an onboard GNSS receiver to determine the reliability of the
in-flight navigation parameters. An analysis was made of the operation
reliability of an autonomous single-frequency Thales Mobile Mapper receiver in
air navigation as compared to the technical operation of a dual-frequency
Topcon HiperPro receiver. To this end, this work contains a comparison of the
aircraft flight navigation parameters based on readings obtained from the
Thales Mobile Mapper and Topcon HiperPro receivers. In particular, the
comparison concerned the reliability of coordinate determination and flight
speed parameters of an aircraft. The research experiment was conducted using a
Cessna 172 aircraft, a property of the Military University of Aviation in
Dęblin, Poland. Technical operation of the GNSS satellite receivers was
tested in the flights of the Cessna 172 aircraft around the EPDE military
airport in Dęblin. Based on the results obtained from the tests, it was
found that the operational reliability of the Thales Mobile Mapper in the
operational phase of the in-flight test ranged from -3.8 to +6.9 m in the XYZ
geocentric frame and from -2.2 to +8.1 m in the BLh ellipsoidal frame,
respectively. On the other hand, the accuracy of the Cessna 172 aircraft
positioning when using the Thales Mobile Mapper receiver was higher than 1.7 m
in the XYZ geocentric frame and higher than 2 m in the BLh ellipsoidal frame,
respectively. Furthermore, the reliability of the Cessna 172 flight speed
determination was from -3.4 to +2.4 m/s.
Keywords: GNSS, satellite receiver, flight test
1. INTRODUCTION
A GNSS navigation receiver is an
indispensable component of every aircraft's onboard avionics. In particular, in
the present reality of a globalised world, the knowledge of the actual position
of the aircraft forces aviation engineers to build more advanced onboard
instruments comprising built-in GNSS receivers. The process of determining the
actual position of an aircraft appears to be a key navigation parameter in the
operation of aircraft used in aviation. Similar needs exist in maritime traffic
[2]. Moreover, the GNSS sensor implementation in air navigation must be
consistent with the certification of GNSS satellite systems to be used in aviation,
published and recommended by the International Civil Aviation Organisation
(ICAO). Following the adopted ICAO terminology, global GNSS navigation systems
can be used in aircraft operations within the framework of the following:
- GPS navigation system,
- GLONASS navigation system,
- ABAS support system,
- SBAS support system,
- GBAS support system [10].
Each of the aforementioned GNSS
satellite systems used in aviation has its own technical parameters and
specifications within the accuracy, reliability, availability, and continuity
of aircraft positioning [1]. The GPS and GLONASS satellite systems may be used
as support systems to provide source data to an FMS onboard computer.
Furthermore, GPS and GLONASS navigation systems can be used in air operations
such as en-route and terminal navigation, and in the non-precision GNSS
approach to landing procedure (NPA) [6]. The ABAS support system is an
extension of the GPS and GLONASS systems' operation in aviation, with a RAIM
(Receiver Autonomous Integrity Monitoring) module function enabling continuous
monitoring of GNSS signals, as well as the real-time detection of aircraft
position errors and the loss of position solution [3]. The SBAS support system
is used in such air operations as the NPA GNSS non-precision approach and SBAS
APV-I and SBAS APV-II approach. The GBAS support system is alternatively used
particularly in Cat I Precision Approach (PA) [6]. The implementation of a GNSS
sensor in the operation of an aircraft during an air operation phase forces the
appropriate selection, adaptation and assembly of a certain class GNSS
satellite receiver. There are three classes of receivers used in air
navigation: A – instruments comprising a GNSS receiver and blocks
performing navigation functions, B – instruments in which the GNSS
receiver is the data source for the integrated aircraft navigation system, C–
devices in which a GNSS receiver is the data source for the integrated aircraft
navigation system controlling the flight in the autopilot mode.
For the GNSS satellite navigation
technology implementation, during the aircraft operation, it is very important
to determine the operational reliability parameter of an onboard GNSS satellite
receiver. Reliability parameter may be determined for one or more GNSS
receivers installed onboard the aircraft. The reliability parameter in air
navigation determines the number of independent elements, which control the
obtained values of a specific technical parameter in the active phase of the
aircraft operation [11]. In its literal sense, a given, obtained, technical
parameter of the aircraft ought to be subjected to external validation and
verification to determine its suitability, readiness for operation, and to
maintain the operation range in which readings from the equipment are obtained.
In the area of GNSS satellite technology application in air navigation, these
will be the control elements in the following forms: application of another
GNSS receiver onboard the aircraft, application of another test method (or measurement
technique) to check the reliability of the results obtained, or application of
another software to verify the calculations performed. Within the scope of the
GNSS satellite technique application in air navigation, the following technical
parameters of an aircraft can be controlled: BLh coordinates in 3D space,
speed, HPR (Heading, Pitch, Roll) orientation angles, precise flight time of
the aircraft, etc.
This article aims to assess the reliability of
the onboard GNSS receiver operation in the operation phase of the Cessna 172
during a test flight around the EPDE military airport in Dęblin. In the
research test, navigation data coming from two satellite receivers, Thales
Mobile Mapper and Topcon HiperPro, placed in the cockpit of the Cessna 172 aircraft
were used in the process of determining reliability. In particular, this
article contains verification and validation of the readings of aircraft
coordinates, in the BLh ellipsoid frame and the XYZ geocentric frame, based on
navigation data obtained from both GNSS satellite receivers. A new approach to
the assessment of a GNSS satellite receiver reliability of operation in air
navigation is presented in this study. The research method presented in this
work makes it possible and ensures the verification of the operation of an
autonomous GNSS receiver with the navigation solution obtained from a GNSS
receiver in the post-processing mode. This article has been divided into four
sections: 1- introduction, 2- materials and method, 3- results and discussion,
4- conclusions. A list of reference literature has been added at the end of
this article.
2. MATERIALS AND METHOD
For completing the research task, two navigation receivers were used, a
single-frequency Thales Mobile Mapper code receiver and a dual-frequency Topcon
HiperPro code-phase receiver. Both receivers were placed in the cockpit of a
Cessna 172 aircraft (Figure 1). The GNSS receivers were mounted in the cockpit
so that the gap between them was the smallest possible and did not exceed 10 cm
[7]. The GNSS receivers were used to determine the precise trajectory of the
Cessna 172 aircraft flight around the EPDE military airport, which belongs to
the 41st Air Training Base of the Polish Air Force in Dęblin, Poland. The
test flight of the Cessna 172 aircraft was conducted along the Dęblin
– Kozienice – Kazimierz Dolny – Puławy –
Dęblin route. The duration of the test flight was approximately 1 hour
according to GPST time [5]. The ellipsoidal height of the Cessna 172 flight
ranged from approximately 150 to almost 750 m. The flight speed of the Cessna
172 ranged from 0 to the maximum value of approximately 80 m/s. The Thales
Mobile Mapper receiver recorded the position of the Cessna 172 in real-time,
with a 1-second interval. The Topcon HiperPro receiver recorded raw GPS
observations, upon which the reference position of the Cessna 172 could be
determined. The recording frequency of the GPS observations in the Topcon
HiperPro was also 1 second.
During the in-flight experiment, the Thales Mobile Mapper code receiver
was monitoring and displaying the changes of BLh coordinates in real-time. The
position parameters of the Cessna 172 were used by the pilots to assess the
position reliability and determine the aircraft trajectory. In addition, the
Thales Mobile Mapper receiver was working in the GPS constellation tracking
mode, and the readings of the aircraft position were related to the WGS-84
global system. Basic technical and configuration parameters of the Thales
Mobile Mapper receiver in the GPS tracking mode for navigation positioning can
be characterised as follows: operating memory, typically up to 4 MB RAM (even
32 MB or 64 MB as an option); internal receiver software: Mobile Mapper Field
and Mobile Mapper Office; data export format: SHP, MIF, and DXF, the capability
of using GIS tools: yes; the capability of using base maps: yes; reference
system: global, standard WGS-84; calculation modes: GPS, EGNOS, DGPS; maximum
number of tracked GPS satellites: up to 12; GPS satellite tracking mode:
sequential; calculation initialisation: "cold start" < 2 minutes,
"warm start" <1 minute, "hot start" < 15 seconds;
calculation interval and observation recording time: typically 1 second or 2
seconds; positioning accuracy: up to 3 m; receiving antenna: in-built within
the receiver; receiver weight: less than 0.5 kg; battery life: typically up to
8 hours; number of batteries in the set: 2 in-built batteries as standard;
weather conditions of using the receiver: air temperature from -10 to +60°C
[9].

Fig. 1. Thales Mobile Mapper and Topcon HiperPro receivers onboard the
Cessna 172
Source: scientific materials from the Institute of Navigation of MUA in
Dęblin
Owing to the GPS code observations that were recorded, it was possible
to retrieve the position of the Cessna 172 aircraft using the Topcon HiperPro
receiver in the post-processing mode. The BLh ellipsoidal coordinates of the
Cessna 172 aircraft was determined based on the GPS observations performed by
the Topcon HiperPro receiver, were retrieved in the RTKLIB software (RTKPOST
module). RTKLIB is an open source application development tool similarly used
for GNSS satellite positioning in air navigation [19].
Both in
the internal software of the Thales Mobile Mapper receiver and the RTKLIB
application, Single Point Positioning (SPP) absolute method for GPS L1-C/A code
observations was used in calculating the position of the Cessna 172 aircraft,
given below [16]:
![]() (1)
(1)
where:
![]() - code
measurement of the L1-C/A in the GPS system,
- code
measurement of the L1-C/A in the GPS system,
![]() - geometric
satellite-receiver distance,
- geometric
satellite-receiver distance,
![]() ,
,
![]() - aircraft
coordinates in the XYZ geocentric frame,
- aircraft
coordinates in the XYZ geocentric frame,
![]() -
coordinates of GPS satellites in the orbit,
-
coordinates of GPS satellites in the orbit,
![]() - speed of
light,
- speed of
light,
![]() - receiver
clock bias correction,
- receiver
clock bias correction,
![]() - satellite
clock bias correction,
- satellite
clock bias correction,
![]() -
ionospheric correction,
-
ionospheric correction,
![]() -
tropospheric correction,
-
tropospheric correction,
![]() -
relativistic effect,
-
relativistic effect,
![]() - total
value of hardware delays for the satellite and the receiver,
- total
value of hardware delays for the satellite and the receiver,
![]() - multipath
effect.
- multipath
effect.
The coordinates of the aircraft related to the geocentric XYZ frame are
determined using the least squares method in the stochastic process below [14]:
 (2)
(2)
where:
![]() - vector of
parameters searched for,
- vector of
parameters searched for, ![]() ,
,
![]() - matrix of
the standard equation frame,
- matrix of
the standard equation frame,
![]() - design
matrix,
- design
matrix,
![]() - matrix of
weights,
- matrix of
weights,
![]() - vector of
free terms,
- vector of
free terms,
![]() - vector
defining the difference between observed and approximate coordinates determined
from the model,
- vector
defining the difference between observed and approximate coordinates determined
from the model,
![]() - vector of
corrections.
- vector of
corrections.
The position of the Cessna 172 aircraft expressed in the geocentric XYZ
coordinate frame is transformed into the BLh ellipsoidal coordinate frame as
written below [14, 16]:
 (3)
(3)
where:
![]() - semi-major
and semi-minor axis of the WGS-84 ellipsoid,
- semi-major
and semi-minor axis of the WGS-84 ellipsoid,
![]() -
eccentricity,
-
eccentricity, ![]() ,
,
![]() - prime
vertical circle curvature radius,
- prime
vertical circle curvature radius, ![]() ,
,
![]() ,
,
![]() ,
,
![]() - step of iteration,
- step of iteration,
![]() ,
,
![]() - aircraft
coordinates in the geodesic frame,
- aircraft
coordinates in the geodesic frame,
![]() - geodesic
latitude,
- geodesic
latitude,
![]() - geodesic
longitude,
- geodesic
longitude,
![]() -
ellipsoidal height.
-
ellipsoidal height.
The coordinates of the Cessna 172
aircraft obtained from the Thales Mobile Mapper and Topcon HiperPro receivers,
determined based on equations (2) and (3) will be compared to determine the
accuracy of GPS satellite positioning and the reliability of the GPS navigation
system operation in aviation. The results of the comparisons are presented in
Section 3.
3. RESULTS AND DISCUSSION
In the research test, first, the reliability of the GNSS receivers in
tracking GPS satellites was determined. Figure 2 presents the number of GPS
satellites being tracked by the Thales Mobile Mapper and the Topcon HiperPro
receivers, respectively. In the operation of the Thales Mobile Mapper receiver,
the number of satellites tracked was from 6 to 9. Moreover, the average number
of GPS satellites tracked by the Thales Mobile Mapper receiver was 8. As far as
the Topcon HiperPro receiver is concerned, the number of satellites tracked was
from 6 to 10. Moreover, the average number of GPS satellites tracked by the
Topcon HiperPro receiver was approximately 9. The Topcon HiperPro receiver
tracked approximately 8% more GPS satellites than the Thales Mobile Mapper. The
key element in the reliability of tracking GPS satellites by both onboard GNSS
receivers is maintaining and sustaining the continuity of navigation data
recording during their activity in flight operations [12]. Moreover, the number
of GPS satellites tracked by each GNSS onboard receiver was at least 6, which
allowed the determination of the aircraft's navigation position and controlling
navigation calculations by mechanisms and algorithms of the RAIM module. In the
aspect of ICAO technical standards and recommendations, the availability of the
GPS satellite constellations should be 99% of the in-flight test duration [10].
Consequently, the operation of the GNSS onboard receivers met the ICAO criteria
for maintaining the availability and visibility of the GPS navigation system
constellation during an in-flight experiment.
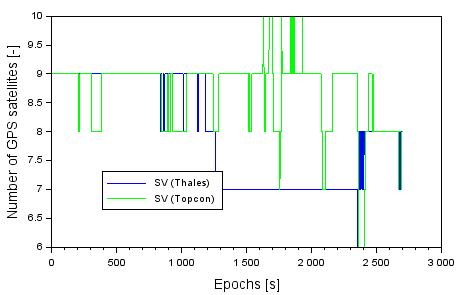
Fig. 2. The number of GPS satellites tracked by
the Thales Mobile Mapper and Topcon HiperPro receivers
The second phase of this study concerned the reliability of determining
the aircraft coordinates in the XYZ geocentric system based on navigation data
obtained from the Thales Mobile Mapper and Topcon HiperPro receivers. For this
purpose, the difference of the aircraft coordinate values - in the geocentric
XYZ frame - was determined based on the autonomous solution and post-processing
shown below [13]:
 (4)
(4)
where:
![]() - aircraft
coordinate along the X-axis of the geocentric system from the Thales Mobile
Mapper solution,
- aircraft
coordinate along the X-axis of the geocentric system from the Thales Mobile
Mapper solution,
![]() - aircraft
coordinate along the Y-axis of the geocentric system from the Thales Mobile
Mapper solution,
- aircraft
coordinate along the Y-axis of the geocentric system from the Thales Mobile
Mapper solution,
![]() - aircraft
coordinate along the Z-axis of the geocentric system from the Thales Mobile
Mapper solution,
- aircraft
coordinate along the Z-axis of the geocentric system from the Thales Mobile
Mapper solution,
![]() - aircraft
coordinate along the X-axis of the geocentric system from the Topcon HiperPro
solution,
- aircraft
coordinate along the X-axis of the geocentric system from the Topcon HiperPro
solution,
![]() - aircraft
coordinate along the Y-axis of the geocentric system from the Topcon HiperPro
solution,
- aircraft
coordinate along the Y-axis of the geocentric system from the Topcon HiperPro
solution,
![]() - aircraft
coordinate along the Z-axis of the geocentric system from the Topcon HiperPro
solution.
- aircraft
coordinate along the Z-axis of the geocentric system from the Topcon HiperPro
solution.
Figure 3
presents the results of the reliability parameter determination in the ![]() coordinate determination for the Cessna
172 aircraft.
coordinate determination for the Cessna
172 aircraft.
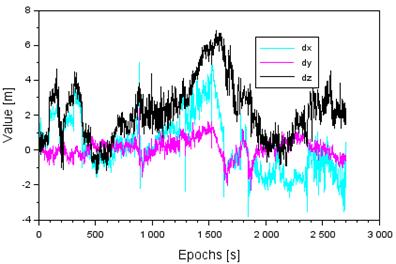
Fig. 3. Reliability of determining the Cessna 172 coordinates in the XYZ
geocentric frame
The reliability values of determining the Cessna 172 coordinates along
the X-axis are from
-3.8 to +5.7 m, respectively. Moreover, the mean value of the Vo ![]() parameter equals 0.3 m, with the
statistical median being 0.2 m. It should be stressed that in the initial
flight phase, the values of the
parameter equals 0.3 m, with the
statistical median being 0.2 m. It should be stressed that in the initial
flight phase, the values of the ![]() parameter are positive, whereas in the
final flight phase, during the landing approach, the values of the
parameter are positive, whereas in the
final flight phase, during the landing approach, the values of the ![]() parameter are definitely negative. The
reliability values of determining the Cessna 172 coordinates along the Y-axis
are from -2.3 to +2.4 m, respectively. Moreover, the mean value of the
parameter are definitely negative. The
reliability values of determining the Cessna 172 coordinates along the Y-axis
are from -2.3 to +2.4 m, respectively. Moreover, the mean value of the ![]() parameter equals 0.1 m with the
statistical median being also equal to 0.1 m. The character of the
parameter equals 0.1 m with the
statistical median being also equal to 0.1 m. The character of the ![]() parameter changes has the lowest
dispersion in comparison with the
parameter changes has the lowest
dispersion in comparison with the ![]() parameters. Thus, the reliability of
determining the aircraft coordinates along the Y-axis is the best in the
presented research test. The reliability values of determining the Cessna 172
coordinates along the Z-axis are from -1.4 to +6.9 m, respectively. Moreover,
the mean value of the
parameters. Thus, the reliability of
determining the aircraft coordinates along the Y-axis is the best in the
presented research test. The reliability values of determining the Cessna 172
coordinates along the Z-axis are from -1.4 to +6.9 m, respectively. Moreover,
the mean value of the ![]() parameter equals 2.2 m, with the median
being 2.1 m. The character of the
parameter equals 2.2 m, with the median
being 2.1 m. The character of the ![]() parameter dispersion is the highest in
comparison with the
parameter dispersion is the highest in
comparison with the ![]() parameters. Subsequently, the reliability
of determining the aircraft coordinates along the Z-axis is the worst in the
presented research test.
parameters. Subsequently, the reliability
of determining the aircraft coordinates along the Z-axis is the worst in the
presented research test.
Within the scope of determining the
aircraft coordinates in the XYZ geocentric frame, the accuracy of satellite
positioning using the SPP method in air navigation was determined as below
[17]:
 (5)
(5)
where:
![]() - number of
the parameter set
- number of
the parameter set ![]() .
.
Using the SPP method, the respective accuracy of the aircraft
positioning is, 1.6 m along the X-axis, more than 0.5 m along the Y-axis, and
approximately 1.7 m along the Z-axis. It should be noted that the highest RMS
error value is along the Z-axis whereas the lowest along the Y-axis.
The third phase of this study concerned the position displacement vector
of the Cessna 172 aircraft position in the XYZ geocentric frame. The position
displacement vector, referred to as the ![]() parameter was determined from the
following relationship [15]:
parameter was determined from the
following relationship [15]:
![]() (6)
(6)

Fig. 4. The 3D-error
parameter values in the XYZ geocentric frame
The values
of the ![]() parameter were determined and presented
in Figure 4. The respective values of the
parameter were determined and presented
in Figure 4. The respective values of the ![]() parameter equal from 0.2 to 8.2 m
Moreover, the mean value of the
parameter equal from 0.2 to 8.2 m
Moreover, the mean value of the ![]() parameter equals 2.8 m, with its median
being 2.5 m. More than 34% of all
parameter equals 2.8 m, with its median
being 2.5 m. More than 34% of all ![]() parameter results is less than 2 m,
whereas approximately 81% of
parameter results is less than 2 m,
whereas approximately 81% of ![]() parameter results is less than 4 m. It is
worth mentioning that in the middle phase of the experiment, the value of the
parameter results is less than 4 m. It is
worth mentioning that in the middle phase of the experiment, the value of the ![]() parameter rises to more than 8 m, and in
the final flight phase, is less than 4 m.
parameter rises to more than 8 m, and in
the final flight phase, is less than 4 m.
The fourth phase of this study concerned the reliability of determining
the aircraft coordinates in the BLh ellipsoidal frame based on the navigation
data obtained from the Thales Mobile Mapper and Topcon HiperPro receivers. For
this purpose, the difference of the aircraft coordinate values - in the
ellipsoidal BLh frame - was determined as below [18]:
 (7)
(7)
where:
![]() - value of
the aircraft B coordinate value from the Thales Mobile Mapper solution,
- value of
the aircraft B coordinate value from the Thales Mobile Mapper solution,
![]() - value of
the aircraft L coordinate value from the Thales Mobile Mapper solution,
- value of
the aircraft L coordinate value from the Thales Mobile Mapper solution,
![]() - value of
the aircraft h coordinate value from the Thales Mobile Mapper solution,
- value of
the aircraft h coordinate value from the Thales Mobile Mapper solution,
![]() - value of
the aircraft B coordinate value from the Topcon HiperPro solution,
- value of
the aircraft B coordinate value from the Topcon HiperPro solution,
![]() - value of
the aircraft L coordinate value from the Topcon HiperPro solution,
- value of
the aircraft L coordinate value from the Topcon HiperPro solution,
![]() - value of
the aircraft h coordinate value from the Topcon HiperPro solution.
- value of
the aircraft h coordinate value from the Topcon HiperPro solution.
Figure 5
presents the results of the reliability parameter determination in the ![]() coordinate determination for the Cessna
172 aircraft.
coordinate determination for the Cessna
172 aircraft.
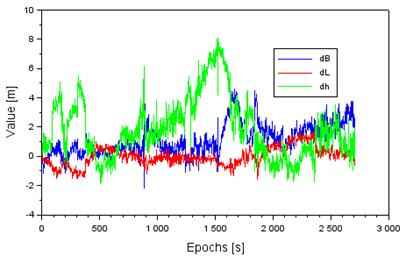
Fig. 5. The reliability of determining the Cessna 172 coordinates in the
BLh ellipsoidal frame
The reliability values of determining the Cessna 172 coordinates for the
B component are from -2.2 to +5.7 m, respectively. Moreover, the mean value of
the ![]() parameter equals 1.2 m, with the median
being 0.9 m. It should be noted that in the initial flight phase, the values of
the
parameter equals 1.2 m, with the median
being 0.9 m. It should be noted that in the initial flight phase, the values of
the ![]() parameter are close to zero, whereas in
the final flight phase, during the landing approach, the values of the
parameter are close to zero, whereas in
the final flight phase, during the landing approach, the values of the ![]() parameter are definitely positive. The
reliability values of determining the Cessna 172 coordinates for the L
component are from -1.6 to +1.7 m, respectively. Moreover, the mean value of
the
parameter are definitely positive. The
reliability values of determining the Cessna 172 coordinates for the L
component are from -1.6 to +1.7 m, respectively. Moreover, the mean value of
the ![]() parameter equals 0.1 m, with the statistical
median being also 0.1 m. The character of the
parameter equals 0.1 m, with the statistical
median being also 0.1 m. The character of the ![]() parameter changes has the lowest
dispersion in comparison with the
parameter changes has the lowest
dispersion in comparison with the ![]() parameters. Thus, the reliability of
determining the aircraft coordinates along the L-axis is the best in the
presented research test. The reliability values of determining the Cessna 172
coordinates for the h coordinate are from -1.9 to +8.1 m, respectively.
Moreover, the mean value of the
parameters. Thus, the reliability of
determining the aircraft coordinates along the L-axis is the best in the
presented research test. The reliability values of determining the Cessna 172
coordinates for the h coordinate are from -1.9 to +8.1 m, respectively.
Moreover, the mean value of the ![]() parameter equals 1.9 m, with the median
being 1.5 m. The character of the
parameter equals 1.9 m, with the median
being 1.5 m. The character of the ![]() parameter changes has the highest
dispersion in comparison with the
parameter changes has the highest
dispersion in comparison with the ![]() parameters. Subsequently, the reliability
of determining the aircraft coordinates along the h-axis is the worst in the
presented research test. Especially in the middle phase of the flight, the
dispersion of the
parameters. Subsequently, the reliability
of determining the aircraft coordinates along the h-axis is the worst in the
presented research test. Especially in the middle phase of the flight, the
dispersion of the ![]() parameter results is quite large and
exceeds 8 m.
parameter results is quite large and
exceeds 8 m.
Regarding the reliability of the aircraft coordinate determination in
the BLh ellipsoidal frame, the accuracy of satellite positioning using the SPP
method in air navigation was determined as below [4]:
 (8)
(8)
where:
![]() - number of
the parameter set
- number of
the parameter set ![]() ,
, ![]() .
.
Using the
SPP method, the respective accuracy of the aircraft positioning, is
approximately 1.1 m along the B-axis, more than 0.6 m along the L-axis, and
more than 2 m along the h-axis. It would be observed that the highest RMS error
value is along the h-axis, whereas the lowest along the L-axis.
In the last
phase of the comparison and verification of the GNSS receiver operation during
an air operation, the comparison was made between the reliability of the flight
speed parameter determination using the autonomous solution and the
post-processing mode. Namely, the flight speed parameter readings from the
Thales Mobile Mapper and the Topcon HiperPro solutions were verified, as below
[8]:
![]() (9)
(9)
where:
![]() - difference
of flight speed readings,
- difference
of flight speed readings,
![]() - aircraft
velocity based on the Thales Mobile Mapper solution,
- aircraft
velocity based on the Thales Mobile Mapper solution,
![]() - aircraft
velocity based on the Topcon HiperPro solution.
- aircraft
velocity based on the Topcon HiperPro solution.
The values of the ![]() parameter were determined and presented
in Figure 6. The reliability values of the Cessna 172 flight speed
determination were from -3.4 to +2.4 m/s. Moreover, the mean value of the
parameter were determined and presented
in Figure 6. The reliability values of the Cessna 172 flight speed
determination were from -3.4 to +2.4 m/s. Moreover, the mean value of the ![]() parameter equals -0.1 m/s, with the
statistical median being -0.1 m/s too. In addition, approximately 99% of all
parameter equals -0.1 m/s, with the
statistical median being -0.1 m/s too. In addition, approximately 99% of all ![]() parameter results belong to the -1 to +1
m/s range. Furthermore, the reliability of the
parameter results belong to the -1 to +1
m/s range. Furthermore, the reliability of the ![]() parameter reading determined employing
the RMS parameter equals approximately 0.3 m/s.
parameter reading determined employing
the RMS parameter equals approximately 0.3 m/s.
The process of
aircraft operation in terms of determining navigation parameters using the GNSS
satellite technology is crucial in the safety aspect of flight operations. The
reliability of the GNSS onboard receiver operation and the credibility of
navigational data readings are the basic technical elements that enable
determining the quality of the navigation solution in aircraft positioning.
Verification and validation tests of an onboard GNSS receiver should be
performed periodically, using precision dual-frequency geodesic receivers that
enable checking and monitoring the changes in aircraft navigation parameter
readings from an autonomous solution in real-time. Such an approach is
important as it allows the determination of gross errors in the aircraft
coordinates determined or detection of systematic errors in the aircraft
coordinate changes. In the analysed
example, the catalogue accuracy of determining the aircraft position using the
Thales Mobile Mapper is 3 m. Therefore, the boundary error of the coordinate
determination reliability using the Thales Mobile Mapper may be up to 9 m. Considering the research results from
Figures 3 and 5, we may conclude that the obtained reliability values of the
Thales Mobile Mapper receiver to the Topcon HiperPro receiver do not exceed the
9 m limit. Additionally, the tests performed, meet the boundary criterion of
operation and admission of the Thales Mobile Mapper onboard receiver to use.
Moreover, this solution allows further testing of the Thales Mobile Mapper
receiver in the operation of the Cessna 172 aircraft and enables planning
subsequent flight operations using the GNSS satellite technology in aviation.
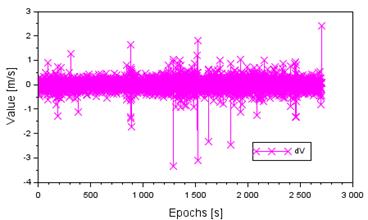
Fig.
6. The reliability of determining the flight speed of the Cessna 172 aircraft
4. CONCLUSION
In this article, the reliability parameters of the
onboard GNSS receiver operation was described in the operation phase of the
in-flight experiment. Particularly, the reliability of the following aircraft
flight parameters was determined using the GPS satellite technology: the
availability of traced satellite constellations, coordinates of the aircraft
position in the XYZ geocentric and ellipsoid BLh frames, and flight speed. The
research test was conducted for the Thales Mobile Mapper receiver installed
onboard a Cessna 172 aircraft. Thales Mobile Mapper receiver is a
single-frequency GPS satellite receiver, which records aircraft navigation data
in real-time. The reliability of aircraft flight navigation parameters was
verified and validated against the solution obtained using the Topcon HiperPro
receiver in a post-processing mode. Both satellite receivers were used in the
in-flight experiment at the EPDE military airport in Dęblin. The
reliability of determining the position of the Cessna 172 aircraft in the
geocentric XYZ frame ranged from -3.8 to +6.9 m, whereas in the ellipsoidal BLh
frame, it ranged from -2.2 to +8.1 m. Furthermore, the reliability of the
Cessna 172 flight speed determination was from -3.4 to +2.4 m/s. On the other
hand, the positioning accuracy of the Cessna 172 aircraft was higher than 1.7 m
in the geocentric XYZ frame and higher than 2 m in the BLh ellipsoidal frame,
respectively. Moreover, the accuracy of the flight speed determination for the
Cessna 172 aircraft was 0.3 m/s. The research tests conducted, confirm the
usefulness of the Thales Mobile Mapper in air operations.
Acknowledgements:
The authors wish to express their gratitude to
Mr Tomoji Takasu for sharing the RTKLIB software on the http://www.rtklib.com
website and Mr Adam Ciećko for equally sharing the research materials from
the in-flight experiment in Dęblin.
References
1.
Banaszek
K., M. Malarski. 2009. “Ryzyko operacji lotniskowych a
dokładność pozycjonowania (RNP)”. Problemy eksploatacji
4: 71-78. [In Polish: „Risk of airport operations and positioning
accuracy (RNP)”].
2.
Bistrović
Miroslav, Domagoj Komorčec. 2015. “Impact of E-Navigation on ECDIS
Development as a Decision Support System”. Nase More 62(1): 30-38.
3.
Ciećko
A., G. Grunwald. 2017. “Examination
of autonomous GPS and GPS/EGNOS integrity and accuracy for aeronautical
applications”. Periodica Polytechnica Civil-Engineering, 61(4):
920-928. DOI: https://doi.org/10.3311/PPci.10022.
4.
Chai T., R.R.
Draxler. 2014. “Root mean square error (RMSE) or mean absolute error
(MAE)? – Arguments against avoiding RMSE in the literature”. Geoscientific
Model Development 7: 1247-1250. DOI: 10.5194/gmd-7-1247-2014.
5.
Ćwiklak J.,
H. Jafernik. 2010. “The monitoring system for aircraft and vehicles of
public order services based on GNSS”. Annual of Navigation 16:
15-24.
6.
Fellner
A., H. Jafernik, P. Trómiński. 2011. “RNAV GNSS
niezbędnym etapem implementacji LUN i szansa dla polskiego General
Aviation”. Prace Instytutu Lotnictwa 211: 57-67. [In Polish:
„RNAV GNSS is a necessary stage of LUN implementation and an opportunity
for Polish General Aviation”].
7.
Grzegorzewski
M., W. Jaruszewski, A. Fellner, S. Oszczak, A. Wasilewski, Z. Rzepecka, J.
Kapcia, T. Popławski. 1999.
“Preliminary results of DGPS/DGLONASS aircraft positioning in flight
approaches and landings”. Annual of Navigation 1: 41-53.
8.
He K. 2015. DGNSS
Kinematic Position and Velocity Determination for Airborne Gravimetry. Scientific Technical Report 15/04, GFZ
German Research Centre for Geosciences. DOI: 10.2312/GFZ.b103-15044.
9.
Hejmanowska
B., R. Palm, S. Oszczak, A. Ciećko. 2005. Validation of methods for measurement of land parcel areas. Draft final report, AGH University of Science and
Technology, Cracow.
10.
International
Civil Aviation Organization. 2016. ICAO Standards and Recommended Practices
(SARPS). Annex 10. Volume I (Radionavigation aids). 2006. Available at:
http://www.ulc.gov.pl/pl/prawo/prawomi%C4%99dzynarodowe/206-konwencje.
11.
Kadaj
R. 2009. „Jak rachować
pomiary GPS?”. Geodety
1(19): 10-13. [In Polish: „How to count GPS measurements?”].
12.
Magiera
J. 2015. Analiza i badanie systemu antyspoofingowego GPS. Doctoral dissertation. Gdańsk University of
Technology. [In Polish: Analysis and
testing of the GPS anti-spoofing system].
13.
Masnicki R., C. Specht, J. Mindykowski, P. Dąbrowski, M.
Specht. 2020. “Accuracy Analysis of Measuring
X-Y-Z Coordinates with Regard to the Investigation of the Tombolo
Effect”. Sensors 20: 1167.
14.
Osada
E. 2001. Geodezja. Wrocław: Publishing House of the Wrocław
University of Technology. ISBN 83-7085-663-2.
15.
Rodríguez-Bilbao
I., S.M. Radicella, G. Rodríguez-Caderot, M. Herraiz. 2015. “Precise point positioning performance in
the presence of the 28 October 2003 sudden increase in total electron
content”. Space Weather 13: 698-708. DOI: 10.1002/2015SW001201.
16.
Sanz
Subirana J., J.M. Juan Zornoza, M. Hernandez-Pajares. 2013. GNSS Data Processing, Volume I: Fundamentals and Algorithms.
ESA Communications, ESTEC. Noordwijk, Netherlands. ISBN: 978-92-9221-886-7.
17.
Specht M. 2015.
“Estimating accuracy of defining position
by EGNOS and DGPS systems based on multi-year measurements in 2006-2014”.
Polski Przegląd Kartograficzny 47(2): 127136.
18.
Świątek
A., L. Jaworski, Ł. Tomasik. 2017. “EGNOS
Monitoring Prepared in Space Research Centre P.A.S. for SPMS Project”. Artificial
Satellites 52(4): 109-120. DOI: 10.1515/arsa-2017-0010.
19.
Takasu T. 2013. RTKLIB
ver. 2.4.2 Manual. RTKLIB: An Open Source Program Package for GNSS
Positioning.
Received 07.01.2021; accepted in revised form 08.04.2021
![]()
Scientific
Journal of Silesian University of Technology. Series Transport is licensed
under a Creative Commons Attribution 4.0 International License