Article
citation information:
Kukulski, J.,
Gołębiowski, P., Pyza, D., Jachimowski, R., Wychowański, W. Selected aspects of the
selection of data sent to the vehicle in automatic rail vehicle driving systems.
Scientific Journal of Silesian University
of Technology. Series Transport. 2019, 103,
43-52. ISSN: 0209-3324. DOI: https://doi.org/10.20858/sjsutst.2019.103.4.
Jacek KUKULSKI[1], Piotr
GOŁĘBIOWSKI[2], Dariusz PYZA[3],
Roland JACHIMOWSKI[4], Wawrzyniec
WYCHOWAŃSKI[5]
SELECTED
ASPECTS OF THE SELECTION OF DATA SENT TO THE VEHICLE IN AUTOMATIC RAIL
VEHICLE DRIVING SYSTEMS
Summary. Intensive pursuit in the introduction of automatic
train driving systems, both with and without the driver in the cabin, can be
observed around the world. Implementation of such a system allows for an
increase in both the safety level of traffic and capacity of railway lines and
consequently, an increase in the running frequency of these trains, which is
extremely important in large urban agglomerations. One type of automatic train system
is the CBTC class, in which a wireless network is used for data transmission.
An important issue in the systems of this class is the problem of transferring
information from the track to the train about the possibility and method of
driving. This article describes the possible ways of sending information from
the track to the train. The system of information transmission from track to
trains (SPITP) was defined and
discussed. The general characteristics of the CBTC class systems were
presented. In Poland, a scientific project which aimed at developing the CBTC
class system was recently undertaken. It is called rmCBTC and is being prepared
as part of a project carried out by the Rail-Mil Computers Sp. z o. o. from
Warsaw and the Faculty of Transport of the Warsaw University of Technology,
co-financed by the National Center for Research and Development from the
European Union Funds. This article presents the assumptions of the designed
system and discusses the scope of data that is necessary in the subsystem of
information transfer from the track to the train with the rmCBTC system.
Keywords: rmCBTC, ATP, ATO, ATS,
transmission, railway transport
1. INTRODUCTION
Population increase in cities and
urban agglomerations places a high demand on its public transport, including
rail (subway, urban, suburban and regional railways). Control systems and
signalling systems must evolve and adapt to meet the demand and necessary
capacity increase. As a result, operators focus on maximising the capacity of
railway and metro lines.
The introduction of automatic
driving systems is associated with increasing safety [3] of railway traffic in
both urban and regional transport. These systems exclude the train driver's
participation, thus, eliminating human errors. In addition, it also allows the
increase flow and capacity of the railway line. Greater traffic flow results in
less energy and electricity consumption.
Currently, worldwide in 19
countries and 42 cities, similar systems of automatic control of subway trains
are operated. The total length of the lines on which these vehicles move is
currently around 1000 km and includes 63 metro lines. Fig. 1 shows a map with
selected cities in which automated train driving systems are active.

Fig. 1. Cities with
automated metro lines as of 2013 [9]
The introduction of the automatic
metro train control system is associated with a significant amount of design,
concept and system assumptions which take into account legal regulations that are
defined by IEEE standards (Standards for the Communication-Based Train Control
system), on the basis of generality and recommendations. The final element of a
conceptual work is the process of certification and implementation of such
solutions. In the initial phase, it requires interference in the construction
of selected metro trains. Similar solutions for automatic driving are used in
the European Train Control System (ETCS) level 3. It should be noted that the
solution being studied is under development and has not yet been implemented in
any country.
2. CHARACTERISTICS OF INFORMATION
TRANSMISSION IN A TRAIN-TRACK RELATION
An important issue that arises when
making decisions about the implementation of an automatic train driving system
is the challenge of passing commands to the train. This transfer can be
implemented in many ways [2]:
-
point method (the train upon hovering over the device transmitting the
information, receives the information and then initiates the appropriate train
driving procedures , it should be noted that the transmitted information is
constant and unchanged over time).
-
section method (in the track on a given section, the train detection
devices are installed (where the individual sections are not connected) and a
continuous sectional transmission is carried out from track to train).
-
continuous method (in the track sections along its entire length, train
detection devices are installed (where the individual sections are connected)
and a continuous sectional transmission is carried out from track to train).
Therefore, an important issue when
implementing the automatic train system is the transmission of information from
the track to the train on how to drive the train. Thanks to the use of such a
system of information transmission, the level of traffic safety is increased,
and a significant increase in the capacity of the analysed railway line is
achieved. This is realised by transferring information about the track to the
train [2]:
-
status of signalling devices, which allows the driver to implement the
proceeding scenario in advance (both in terms of shortening and lengthening the
driving times, which has a direct impact on the capacity of the railway line).
-
driver status (checking if the driver has not fainted or is vigilant
enough).
-
the maximum permitted speed on a given section and the possible
activation of devices to limit the speed if exceeded.
-
the possibility to start driving after a standstill at the platform and
self-actuation of drive devices.
-
necessity to stop the vehicle at the designated place (for example, at
the platform).
-
confirmation of precise stopping of the train at the designated place
and releasing the door lock.
-
the exact location of the train.
-
other matters.
The system of transmission of
information from the track to the train (SPITP)
can be presented as follows:
![]() (1)
(1)
where:
EPITP – a set of elements related to the transmission of data from the
track to the train, whereby:
![]() (2)
(2)
ETPITP – a
set of track elements related to the transmission of data from the track to the
train (ETPITP = {etpitp: etpitp ∈ ℕ}).
EPPITP – a
set of train elements related to the transmission of data from the track to the
train (EPPITP = {eppitp: eppitp ∈ ℕ}).
RPITP – a set of relations connecting elements of the system with each
other, as well as elements within the system's environment, which can be
defined as follows:
![]() (3)
(3)
Thus, the relation combines
elements from the set (EPITP) and is
formulated in the form of a Cartesian product. The relation that exist in the
track to train information system (SPITP)
may be formulated as follows:
-
RPITP1 – a relation
connecting two track system elements:
![]() (4)
(4)
![]() (5)
(5)
-
RPITP2 – the relation
connecting two elements - the track system and the on-board element of the
system:
![]() (6)
(6)
![]() (7)
(7)
-
RPITP3 – the relation
connecting the on-board element of the system and the track element of the
system:
![]() (8)
(8)
![]() (9)
(9)
-
RPITP4 – the relation
connecting two on-board elements of the system:
![]() (10)
(10)
![]() (11)
(11)
The set of track elements related
to the transmission of data from the track to the train (ETPITP) contains the following elements [2]:
-
etpitp = 1 – device
track.
-
etpitp = 2 – device
reading the information from the track device.
-
etpitp = 3 – device
coding the information from the track device.
-
etpitp = 4 – transmitter
of information from track device.
-
etpitp = 5 –
transmission system.
The set of train elements related
to transmission of data from the track to the vehicle (EPPITP) contains the following elements [2]:
-
eppitp = 1 –
transmission system.
-
eppitp = 2 – receiver of
information from the track device.
-
eppitp = 3 – device
coding the information from the track device.
-
eppitp = 4 – cabin
devices displaying information from the track device.
-
eppitp = 5 – speedometer
reading the value of vehicle speed from the wheel.
-
eppitp = 6 – devices
controlling the driver’s work.
-
eppitp = 7 – braking
system.
-
eppitp = 8 – starting
system.
-
eppitp = 9 – driver.
Many types of data can be
transmitted using the elements of the track-to-train (SPITP) communication system. Examples include [7], [14], [16], [17]
-
data on the location of the train (beginning and end of the train).
-
speed data for a given section of the railway line.
-
data concerning the direction of a given train.
-
information intended for the conductor and the driver (regarding the
state of the door in the train and on the platform (closed/open/damaged), the
correct stopping position in the platform).
-
data on the status of track-side devices transmitting data from the
track to the train.
-
data on the status of stationary devices of the automatic train driving
system.
-
data regarding the previous vehicle - its location and its state.
-
information whether the train is in an area equipped with automatic
train driving system devices or not.
-
data regarding transmission delays.
-
data on the course performed by the train (for example, riding on a
track terminated with a stopper).
-
data regarding the indications of trackside signallers.
-
data regarding orders relating to train running (setting up an
additional stop at the station, introduction of an additional speed limit).
-
details on the continuity of the train.
-
data on entry into the track work area.
-
data on the occurrence of rail rupture.
-
data on the status of track crossings.
-
data on driver's driving style for energy consumption.
In addition, the track to vehicle
information transfer system (SPITP)
can be integrated with the passenger information system, both vehicle and
platform system [8], [122]. Using the SPITP system, it is possible to deliver
and display relevant messages at any given moment, which are directed to
passengers. The SPITP system can also
be integrated with systems such as:
-
electric traction [4], [188].
-
tunnel and station ventilation.
-
security.
-
communication.
The integration allows for sending
relevant data to the train using the track to train information transfer system
(SPITP) and calling appropriate
on-board equipment operations. One class of automatic train driving systems in
which it is necessary to send information from the track to the train is the
CBTC class systems.
3. CBTC SYSTEMS
CHARACTERISTICS
CBTC is a rail signalling system
that uses telecommunications between the train and trackside devices for
traffic management and infrastructure control. The CBTC system is a
"continuous, automatic train control system” that uses, among
others: determination of the position of a high-resolution train, continuous
and fast bidirectional transmission of data from the track to the train [5], [6]. The Automatic Train
Driving System ATC (Automatic Train Control), can consist of three subsystems [11],
[15]:
-
ATP – Automatic Train Protection.
-
ATO – Automatic Train Operation.
-
ATS – Automatic Train Supervisory.
The ATP system automatically limits
the speed of the train to the value guaranteeing safe driving, it also protects
against collisions and negligence by the driver to the "stop" signal
on the traffic light. In the case of a driver's erroneous actions, the ATP
system shall initiate service or emergency braking causing the train to stop.
The ATO system plays the role of "autopilot", realising the automatic
regulation of the train speed while ensuring the scheduled time of train travel
between stations. The system through its interfaces, controls the train drive
as well as the braking system, adjusting the speed to the traffic situation.
The ATS system controls the
operation of signalling, locates all trains and displays relevant data in the
traffic control centre [11]. Fig. 2 shows CBTC onboard devices, including the
ATP and ATO subsystems in the train.

Fig. 2. CBTC on-board
equipment, including the ATP and ATO subsystems
in the vehicles [6]
In metro systems, automation refers
to a process in which the responsibility of the train’s operation
management is transferred from the driver to the train control system. There
are various degrees of automation (GoA - Grades of Automation) as defined in
the standard [15]. For example, the 4th degree of automation refers to a system
in which vehicles are wholly automatically started without onboard maintenance
personnel. Figure 3 presents the division stages of automation and the
connection of the automation stages with the operation of individual
subsystems.
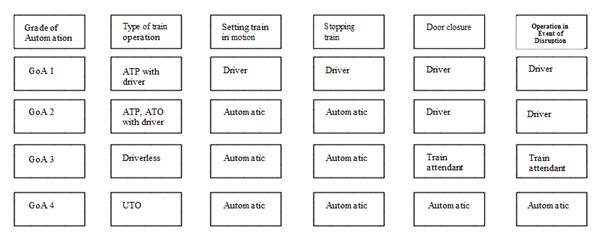
Fig. 3. Grades of
automation and linking of the grades of automation of individual
subsystems [9]
4. ASSUMPTIONS OF THE rmCBTC SYSTEM
FOR DATA TRANSMISSION
As previously mentioned, when
implementing the automatic train driving system, it is very important to
provide information from the track to the train about the possibility and
manner of driving. This issue is one of the topics considered in the project
implemented by Rail-Mil Computers Sp. z o. o. from Warsaw and the Faculty of
Transport of the Warsaw University of Technology. The aim of the project is to
develop an automatic CBTC train driving system, using a unique combination of a
two-way wireless data transmission and components of the interoperable ETCS
rail system, increasing the level of efficiency and safety of the agglomerate
rail transport. The project is implemented as a part of the Smart Growth
Operational Programme and is co-financed by the National Center for Research
and Development. Work on the project began in 2017 and will be finished by
2020.
The most important components that
will be involved in the transmission of data from the track to the train are
rmMAC (central movement authority computer) and rmATO (automatic train
operation). Communication between the permit and vehicle will be carried out
using a fibre-optic communication system and secure communication via WiFi and
radio access points. It should be emphasised that the permit for driving depends
on a number of data provided by the WT UZm dependency devices (via the WT GSS
interface) that support the control of occupancy of track sections, switches
and signalling devices both at the stations and lines.
Permission to drive in automatic
mode will be the basis for the rmATO system, whose basic functions are [1]:
-
switching the engines on and off.
-
switching the brakes on and off.
-
regulation of the driving force.
-
braking force regulation.
Therefore, it would be required to
enter the necessary data for proper operation into the rmATO system. It should
be noted that in addition to the basic data, additional data on the occurrence
of an emergency situation (unforeseen situation of detecting an object in the danger
zone) will be sent to the system.
In order for the central rmMAC
driving computer to permit driving for a given train, the data from the
trackside equipment has to be sent to that computer [16]:
-
information on the status of a given track sections occupancy.
-
information on the location of the rail crossovers.
-
information on the signaller’s indication.
-
information about the travel railroad.
-
information about a fixed direction of travel.
-
information on the existence of objects in the danger zone.
The second component of the rmCBTC
system, which receives data from the trackside devices, is the train automatic
driving system, rmATO. This system will receive the following set of input data
[Błąd!
Nie można odnaleźć źródła odwołania.6]:
-
information on the status of a given track section’s occupancy.
-
information on the signaller’s indication.
-
information on the maximum permitted speed on a given track
section’s of the railway network.
-
information on the location of platforms.
-
information about the need to stop at a specific station.
-
information about temporary voltage decay in the traction network.
-
information about the loss of transmission between the track and the
train.
5. SUMMARY
Intense efforts to implement
automated train driving systems can be observed all over the world. Some
countries decide to introduce the system in a variant where the driver is
present on board the train. Other countries choose the variant where the driver
is absent. Therefore, it is necessary to ensure the highest level of traffic
safety, especially when it is carried out without the presence of a driver. The
introduction of automatic train driving systems has one more important
advantage; it enables increase of the capacity of the railway lines, and thus,
increase the running frequency, which is extremely important in large urban
agglomerations.
One of the classes of automatic
train driving systems is the CBTC class. The most important element of the CBTC
class system is data transmission using the wireless WiFi network. In Poland,
work has been undertaken to develop such a system. It is called the rmCBTC and
is being prepared as part of a project carried out by Rail-Mil Computers Sp. z
o. o. from Warsaw and the Faculty of Transport of the Warsaw University of
Technology,
co-financed by the National Center for Research and Development from the
European Union Funds. Ultimately, the prototype of the system will be set-up in
the Warsaw Metro on the Alstom Metropolis 98B vehicle.
As previously mentioned, an
important issue of the CBTC class systems is the transfer of information from
track to train. The article presents elements constituting the track to train
information transfer system (SPITP)
and discusses the data ranges that are necessary in the subsystem of
information transfer from the track to the vehicle of the rmCBTC system. The
range of the data leads to the conclusion that due to the implementation of the
rmCBTC system, traffic will be conducted in a safe manner and an increase in
the capacity of the Warsaw metro line.
This article is
co-financed by the European Union under the European Regional Development Fund
from the project POIR.01.01.01-00-0276/17

References
1.
Anuszczyk Jan, Andrzej Gocek. 2010. „Hamowanie
pociągów metra z napędem prądu stałego i
przemiennego przy wykorzystaniu systemu ATO”. [In
Polish: „Inhibition of metro trains with DC and AC drive using the ATO
system”]. Zeszyty Problemowe
– Maszyny Elektryczne 86: 23-28.
2.
Bajon-Dąbrowa Mirosława. 2007. Podstawy sterowania ruchem kolejowym. Funkcje, wymagania, zarys techniki. [In
Polish: Basics of railway traffic
control. Functions, requirements, outline of technique]. Warsaw: Warsaw
University of Technology Publishing House.
3.
Burdzik Rafał, Bogusław Nowak, Jacek Rozmus, Paweł
Słowiński, Jarosław Pankiewicz. 2017.
“Safety in the railway industry”. Archives of Transport 44(4): 15-24. ISSN: 0866-9546. DOI: 10.5604/01.3001.0010.6158.
4.
Domin Rostyslav, Iurii Domin, Ganna Cherniak. 2017.
“Estimation of dynamic performances of the safe operation of high-speed
electric train”. Archives of
Transport, 41(1): 7-16.
ISSN: 0866-9546. DOI: 10.5604/01.3001.0009.7374.
5.
Observatory of Automated Metros.
Available at: http://metroautomation.org/.
8.
Hassannayebi
E., S.H. Zegordi, M.R. Amin-Naseri, M. Yaghini. 2018. “Optimizing
headways for urban rail transit services using adaptive particle swarm
algorithms”. Public Transport
10(1): 23-62. DOI: https://doi.org/10.1007/s12469-016-0147-6.
9.
Jakajima
B.V. “Metro automation trend facts: Some of the longest metro lines in
the world are actually automated”. Available at:
https://cargoinnovationconference.com/transport/metro-automation-trend-facts-longest-metro-lines-world-actually-automated/.
10.
IEEE
Std 1474; IEEE Std 1475. Standardy dla
systemu Communication-Based Train Control.
11.
Karkosińska-Brzozowska Natalia. 2015.
“Bezobsługowe linie metra w Europie”. [In
Polish: „Unmanned metro lines in Europe”]. In: Conference of Student Research Group in Transport KoKoNaT 2015:
1-6. Kraków 22-23.04.2015.
12.
Kisielewski
Piotr. 2016. “The system of IT support for logistics in the rail
transport”. Archives of Transport
40(4): 39-50. ISSN: 0866-9546.
DOI: 10.5604/08669546.1225465.
13.
International
Association of Public Transport UITP. “Metro automation facts, figures
and trends”. Available at: https://www.uitp.org/metro-automation-facts-figures-and-trends.
14.
Paś
J, K. Białek. 2018. “Exploitation of selected railway equipment -
conducted disturbance emission examination”. Diagnostyka 19(3): 29-35. DOI: 10.29354/diag/92003.
15.
PN-EN 62290-:2007E. Zastosowania
kolejowe – Systemy zarządzania i kontroli jazdy pojazdu dla
nadzorowanego transportu miejskiego – Część 1: Zasady
systemu i pojęcia podstawowe. [In Polish: PN-EN 62290-:2007E. Railway applications – Vehicle management and control systems for
supervised urban transport – Part 1: System principles and basic concepts]. Warsaw: Polish Committee of
Standardization]
16.
Report
on the implementation of the subtitle I.1.34 "Determination of the scope
of data for systems transmitted to the vehicle" as part of the project
POIR.01.01.01-00-0276 / 17 "CBTC system of automatic driving of railway
vehicles, using a unique combination of two-way wireless data transmission and
the components of the interoperable ETCS rail system, increasing the level of
efficiency and safety in the agglomeration of rail transport." Warsaw,
2018.
17.
Report
on the implementation of the subtitle I.1.34 "Remote reading of vehicle
operating parameters and recording of data from service recorders" as part
of the project POIR.01.01.01-00-0276 / 17 "CBTC system of automatic
driving of railway vehicles, using a unique combination of two-way wireless
data transmission and the components of the interoperable ETCS rail system,
increasing the level of efficiency and safety in the agglomeration of rail
transport." Warsaw, 2018.
18.
Szeląg
Adam. 2017. “Electrical power infrastructure for modern rolling stock
with regard to the railway in Poland”. Archives of Transport 42(2): 75-83. ISSN: 0866-9546. DOI: 10.5604/01.3001.0010.0529.
Received 05.02.2019; accepted in revised form 19.05.2019
![]()
Scientific
Journal of Silesian University of Technology. Series Transport is licensed
under a Creative Commons Attribution 4.0 International License