Article citation information:
Romańska, H., Ułanowicz, L. Use of remotely piloted aircraft systems to
evaluate the effects of transport collision. Scientific Journal of Silesian University of Technology. Series
Transport. 2017, 94, 199-210. ISSN: 0209-3324. DOI: https://doi.org/10.20858/sjsutst.2017.94.18.
Honorata ROMAŃSKA[1],
Leszek UŁANOWICZ[2]
USE OF REMOTELY
PILOTED AIRCRAFT SYSTEMS TO EVALUATE THE EFFECTS OF TRANSPORT COLLISION
Summary. The evaluation of
the effects of transport collision often takes the form of ground
reconnaissance. Undoubtedly, remotely piloted aircraft systems (RPAS)
can support and help the police, firefighters, security agents and paramedics
in the event of a transport collision.
Although there is a scarce amount of literature concerning the use of
RPAS in crisis management, it is important to pay more attention to the
benefits of this technology. The article describes the danger of collisions, as
well as discusses the possibility of using RPAS, their functionality and
potential utility. Sensors installed on RPAS can rapidly identify the place of
the accident, the number of casualties, the type of damaged vehicles or the
type of contamination.
Keywords: transport, remotely piloted
aircraft systems, RPAS, search and rescue, crisis management.
1. INTRODUCTION
The civilizational development of
our age has caused an increase in road, rail and air traffic. Despite a
considerable increase in the outlays for railway and road infrastructure
safety, the occurrence and risk of transport collisions have not been entirely
eliminated to date. A transport collision is defined as a collision between a
vehicle operating inland or sea or air traffic with another vehicle or fixed
obstacle, which mostly results in property damage, as well as causing a
potential hazard to human life. Such events may include vehicle damage, blocked
roads, sinking of ships and leaks from bowsers. An evaluation of the
circumstances of the event is based on the accounts of witnesses or
participants, while the dispatcher or traffic manager who receives a traffic
event report is obliged to notify the appropriate medical, technical, chemical
or ecological services [5]. It is important that the information provided to
the emergency services reflects the actual circumstances to the furthest extent
possible, due to the need to prepare and dispatch an adequate number of
personnel and equipment to carry out the rescue operation. An evaluation of the
effects of collision is usually performed via a ground investigation, which
implies significant limitations in terms of determining the area coverage of
the accident or the field conditions, for instance.
The proposed solution to improve the
capabilities for evaluating the effects of transport collisions is the use of
remotely piloted aircraft. Optoelectronic heads employed in a remotely
piloted aircraft feed a video signal to flight control in real time. This
allows for an analysis of the situation on a current basis, accurate
localization of the event, and assessment of the scale of the accident and the
number of casualties, as well as selecting and engaging the necessary rescue
units. Remotely piloted airships equipped with measuring instruments or
detectors are able to analyse the contamination of toxic gases and determine
the hazard level in the case of hazardous substance leaks, for example.
While the main field of application
of remotely piloted aircraft is currently in the context of military activity,
it is advisable to adapt this technology to public order applications, and crisis
management in particular. This use of new and dynamically developing technology
is becoming increasingly popular around the world.
2. ENVIRONMENTAL HAZARDS
RESULTING FROM TRANSPORT COLLISIONS
The most dangerous branch of
transport is land transportation, including road and rail traffic [13]. It is
this area of transportation where inter-vehicle collisions or collisions with
fixed obstacles are the most frequent. The main effects include vehicle damage,
property damage, hazards to human life and road blockages (Fig. 1.)
|
a) |
b) |
|
|
|


Fig. 1. Effects of land-based road
traffic collision in: a) collision between a bus and a car carrier in Stare
Jeżewo and b) collision between a transporter and a truck in Nowe Miasto [8]
Land collisions may also include
collisions of vehicles carrying hazardous materials. According to the
statistics for the last decade, over 200 million tonnes of goods are
transported by rail transportation annually, with 21 million tonnes of them
containing hazardous materials [6, 7]. Road traffic, on the other hand, conveys
over 1,500 million tonnes of cargo, with 10% containing hazardous substances
[9, 10]. These values include about 170 million tonnes of explosive,
inflammable, toxic, aggressive, infectious and radioactive materials, which are
dangerous to humans, animals and the environment. The hazardous materials
listed above are transported for the purpose of securing and maintaining
industrial production in various branches, including paint and lacquer
production, artificial fertilizer production, and industrial metallurgy and
rubber production. It may be safely assumed that the level of hazardous
substance transportation will not be declining any time soon. Meanwhile,
collision events involving vehicles transporting hazardous substances pose a
danger to local communities and the environment, but the effects of these
substances could be very severe and extensive. Accident scenarios include leaks
of substances from transporting tanks, releases of toxic substances into the
environment, the ignition of fumes and the explosion of cisterns. Recent
examples of dangerous collisions include a collision between a train and a
cistern in Nowa Sól (Fig. 2a), and a collision of cisterns on a siding in
Gutkowo, near Olsztyn (Fig. 2b) [12].
|
a) |
b) |
|
|
|


Fig. 2. Ground traffic
collisions: a) collision between a train and cistern in Nowa Sól
and b) a collision of cisterns in Gutkowo, near Olsztyn [12]
Collisions of sea ships or with
another ship or rocks, or situations of running aground, cause life-threatening
hazards to the personnel and passengers involved. Such accidents may also
result in the pollution of the marine environment by oil or fuel. The most
frequent sea accidents involve tankers transporting oil. Oil leaks are
particularly difficult to remove: the oil floats on water and endangers the
local marine ecosystem, causing the death of birds, fish and other smaller
organisms. The intense mixing of oil with sea water results in a significant
increase in pollution, taking the form of a floating spill patch.
Airborne transportation vehicles,
despite enjoying the reputation of being the safest means of transport, are
also subject to various faults, which may lead to a traffic catastrophe. The
resulting damage suffered by an airplane mainly depends on its travelling speed
and size. Collisions of airborne transporting vehicles with birds or machines
may have catastrophic consequences, resulting in wreckage or human remains
scattered on the ground, often over an extensive area.
3. POSSIBLE USE OF REMOTELY
PILOTED AIRCRAFT FOR EVALUATING TRANSPORTING VEHICLE COLLISION EFFECTS
Any rescue team, despite having the
necessary training and knowledge, is subject to the risk of the loss of health
or life while carrying out a rescue operation. The danger may be significantly
reduced or completely eliminated by employing remotely piloted aircraft for
this purpose. Remotely piloted platforms, equipped with optoelectronic heads,
allow for an evaluation to be performed in real time, with an image being fed
to a ground control station. This solution should permit the current analysis
of the situation and the engagement of the necessary rescue units. The use of
daylight cameras will facilitate the evaluation of the technical condition of
cisterns or tanks damaged in the collision, as well as perform a preliminary
risk assessment. Moreover, the cameras are capable of imaging the topographic
structure of nearby land. The system should be able to estimate the number of
dead or injured, or persons subjected to the risk of intoxication, scalding,
poisoning or other undesirable effects. An aerial view will significantly
facilitate rescue operation planning and enable the quickest route as close to
the accident as possible to be chosen (Fig. 3).


Fig. 3. Highway accident and railway accident observed with the use of remotely piloted aircraft [3]
The platforms, equipped with
chemical contamination detectors or pyrometers, may be dispatched into areas of
low levels of accessibility or high levels of hazard to support rescue units.
This allows for a reduction in the exposure of rescue personnel to dangerous
conditions, while enabling them to stay within a safe distance from the sources
of emission while collecting the required test sample. Remotely piloted
aircraft may also be used to assess the effects of leaks of oil, fuel, machine
fluid or other transported chemicals, which constitute a severe hazard to the
marine and land environment. An aerial observation of the spread of oil, or
other spill in the water, means that the speed of the distribution of the
hazard can be determined.
Firefighting teams are engaged in
rescue operations whenever toxic substances leak from their transportation
tanks. The full basic rescue operation capability within the district area
should be reached within a maximum of 15 min, while full specialist rescue
operation capabilities should be reached within a maximum of 30 min for the most
rigorous readiness levels. Regarding the specialist scope, rescue operations
particularly include identifying hazardous chemical substances, measuring and
analysing hazardous samples in solid, liquid and gaseous form, verifying the
threat, and evacuating humans from the hazard area.
Remotely piloted chemical and
biological reconnaissance aircraft could be employed as permanent equipment for
rescue units, e.g., on a district level. This would significantly speed up the
identification and reconnaissance of emergency situations, along with the
preliminary evaluation of hazards on site.
4. FEATURES OF REMOTELY PILOTED
AIRCRAFTS
RPAS are based on unmanned aircraft
(platforms), as well as on-ground flight control systems. Remotely piloted
aircraft are mobile air objects used to carry task equipment, which may perform flights with the operator
maintaining eye contact with the platform in remote control (RC) mode or
automatic control mode, i.e., without the operator eye contact with the
platform. In the automatic control mode, the remotely piloted aircraft is
capable of making an automatic flight with the use of a GPS signal (multipoint
navigation) by changing navigation points and flight conditions during the
flight. The saved route points may be edited during the flight through radio
communication with the platform. A platform can either have an airframe or a
multirotor design, while a platform of adequate structure is dispatched
depending on the mission to be completed. Airplane-type platforms feature a long
flying range, allowing for the continuous delivery of information to the ground
control station in real time. Multirotor-type platforms have a smaller range,
but their design allows for a vertical start and landing, as well as hovering
above an area or observation point. The ground control station constitutes an
integral part of the system and is necessary for operating the airborne
platform, as its purpose is to control the platform while performing tasks in
various missions in real time, receiving the signal transmitted from the
platform, and decrypting these data, in addition to producing the graphical
presentation of piloting and navigating parameters and data imaging, and
displaying a map reflecting the flight route that is planned and the one currently
followed (Fig. 4).
|
|
|
|
|



Fig. 4. Map image and video
transmission image on the flight control system monitor
The main task of RPAS used for
evaluating the effects of transport collisions is to observe the area where the
collision took place. Photogrammetrical images and data may be collected with
the use of cameras, optoelectronic heads, infrared heads, synthetic aperture
radars, and real-time information transmission systems used in the unmanned
platforms. Observation sensors are built into the heads installed on the
remotely piloted airborne platform (Fig. 5.).
Specialist remotely piloted airborne
platforms allow for the rapid taking of photographs within the visible
spectrum, as well as in infrared (Figs. 6-7). The photographs shown in Figure 6
were taken from an altitude of about 300 m, with the photograph on the right
depicting a man leaning off the starboard of a fish cutter. The photograph
shown in Figure 7 was taken from an altitude of more than 1,000 m.
a) b)


Fig. 5. Heads with observation
sensors installed on remotely piloted airborne platforms


Fig. 6. Photographs taken from a
remotely piloted aircraft
Two persons Five persons Tents Off-road vehicle

Fig. 7. Photograph
taken from a remotely piloted aircraft
at an altitude of more
than 1,000 m
The optoelectronic heads employed in
the system allow for the selection of various types of digital cameras with
different resolutions; the most common set, however, is the combination of a
daylight camera, thermal vision and a laser rangefinder. The object identification
capability is dependent on the image resolution, which is defined by the size
of its single “pixel” (not strictly dependent on the focal distance of the
lens). General reconnaissance allows the presence of objects with a
characteristic shape and distinctive colour to be identified, whereas detailed
reconnaissance allows for the special features of objects to be identified.
Table 1 presents the maximum reconnaissance altitudes for lenses with different
focal lengths, while Figure 8 presents images obtained from an observation at a
45° angle.
Table
1. Estimated values of camera-to-object distance for specific reconnaissance
|
Object |
General reconnaissance |
Detailed reconnaissance |
||
|
Focal length: 8 mm |
Focal length: 12 mm |
Focal length: 8 mm |
Focal length: 12 mm |
|
|
Single
person Passenger
car Truck Building |
78 ÷ 103 m 207 m 310 m 517 m |
144 ÷ 191 m 384 m 576 m 960 m |
26 ÷ 31 m 104 m 186 m 207 m |
48 ÷ 64 m 192 m 346 m 384 m |
|
|
|
|
|
|




Fig. 8. Images obtained from
observing the ground at a 45° angle
Table 2 presents the reconnaissance
area coverage for lenses with different focal lengths and at different
altitudes.
Table 2. Reconnaissance area
coverage for lenses with different focal lengths
|
Altitude |
Focal length |
||
|
3.6 mm |
8 mm |
12 mm |
|
|
50 m |
128 x 94 m |
45 x 39 m |
28 x 26 m |
|
100 m |
256 x 188 m |
90 x 78 m |
56 x 52 m |
|
200 m |
512 x 376 m |
180 x 156 m |
112 x 104 m |
|
300 m |
768 x 564 m |
270 x 234 m |
168 x 156 m |
|
500 m |
1280 x 940 m |
450 x 390 m |
280 x 260 m |
Figure 9 presents angular
observation parameters, Figure 10 presents the reconnaissance strips for
fixed-angle observations, and Figure 11 presents reconnaissance strips for
variable-angle observations.
|
Direction
of flight |
Horizontal angle of the
image Angle of deflection of the
optical axis sidewards Vertical angle of the image Angle of deflection of the
optical axis towards the flight direction |
||||||
|
|
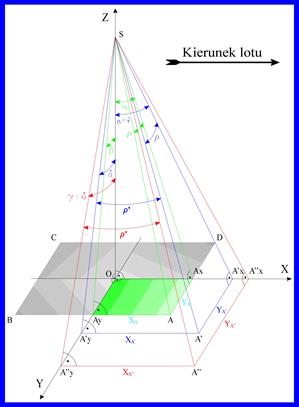
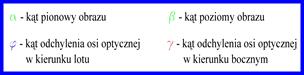

Fig. 9. Angular observation
parameters
distance = photographs
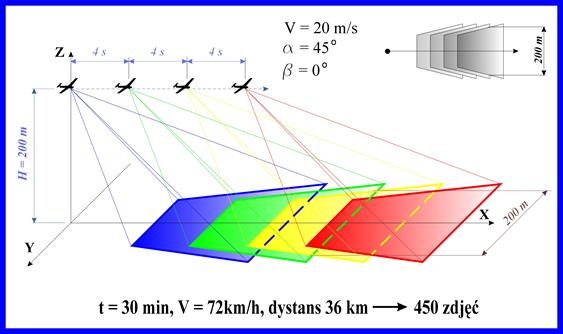
Fig. 10. Reconnaissance strip for
fixed-angle reconnaissance
distance = photographs
Fig. 11. Reconnaissance strip for
variable-angle reconnaissance
Remotely piloted airborne platforms
used for evaluating the effects of traffic collisions may be equipped with
optional reconnaissance sensors or temperature, radiation and hazardous
substance sensors. Instruments installed in the remotely piloted aircraft used
for chemical and biological reconnaissance should facilitate the collection of
test samples, without exposing rescue teams to life- or health-threatening
hazards. Apart from the sample collection features, the system also enables the
detection of gas compounds, including H2S, CH4, CO2
and SO2, as well as the detection of volatile organic compounds
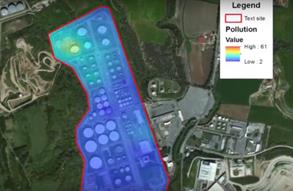
through the use of a gasometric instrument (Fig. 13). Position, altitude,
temperature, humidity and chemical compound concentration parameters,
registered by the system, allow for a contamination map to be drawn in real
time (Fig. 12) [1].
|
|
|
|
Fig. 12. Contamination emission map [1] |
Fig. 13. Scentroid DR 1000, Flying Laboratory [1] |

|
|
|
|
|
Fig. 14. Remotely piloted platform with built-in AED [2] |
Fig. 15. Pars platform with built-in lifebuoy [4] |
|


Adding minor rescue equipment to the
platforms should increase the chances of the quicker convalescence of injured
persons, while remotely piloted platforms equipped with first-aid kits should
be able to supply dressing materials to persons providing first aid to
casualties. The use of an automated external defibrillator (AED) for performing
safe defibrillation in cardiorespiratory arrest situations would also prove
beneficial (Fig. 14). Such a solution was developed by the Belgian engineer,
Alec Momont, who constructed a remotely piloted aircraft with built-in AED. As
GPS navigation is able to locate the person reporting the event (using a GPS
phone), the target can be reached within 3 min. The platform is equipped with a
real-time transmission system, feeding the image to the rescue dispatcher’s
screen. An added facility would be to equip the remotely piloted aircraft with
a voice communication system. The dispatcher could then provide instructions to
the rescuing person through built-in speakers, while, at the same time,
observing the injured person [2].
Apart from this solution, aircraft
could be equipped with lifebuoys, which would increase the chances of survival
for sea castaways by keeping them afloat on the water’s surface until the
arrival of rescue teams. The Iranian company RTS Lab has designed the Pars
platform, which is used for rescuing drowning persons. This remotely piloted aircraft,
which can reach the target much faster than any water rescue teams, is able to
drop the attached lifebuoy near the drowning person. Another innovative idea
has been to create a water platform for the remote-controlled Pars with solar
panels attached to it, allowing the vehicle to charge its batteries between
rescue operations. Furthermore, the platform is designed for charging more than
one remotely piloted aircraft (Fig. 15).
4. CONCLUSION
The tasks performed by remotely
piloted aircraft, with the purpose of evaluating the effects of transport
collisions, facilitate the delivery of information on the occurrence of hazards
in the monitored area more quickly and accurately. Messages delivered to the
operator-dispatcher allow for adequate rescue units to be despatched and
shortening their time of arrival at the collision area. Real-time data
transmission enables the coordination of actions by rescue teams and the
selection of necessary means of aid to be used during the operation. Apart from
cameras, biological and chemical or radioactive contamination detectors limit
direct exposure to the hazardous substances in question. An undoubted benefit
of RPAS is their modular design, which allows for the respective system to be
appropriately configured for the airborne operation carried out. Additionally,
these vehicles may be used to deliver a first-aid kid or AED in rescue areas
with limited accessibility. The continued development of remotely piloted
flying systems should further improve the way in which crises are managed.
References
1.
“DR1000,
Flying Laboratory”. 2016. Available at: http://scentroid.com/scentroid-dr1000.
2.
“Dron
ratowniczy – latający defibrylator Aleca Momonta”. [In Polish: “Aleca Momonta’s
ambulance drone”]. 2016. Available at:
http://www.swiatdronow.pl/dron-ratowniczy-latajacy-defibrylator-aleca-momonta.
3.
“Dron
ratunkowy”. [In Polish: “Ambulance drone”]. 2016. Available at: http://joemonster.org/filmy/64715.
4.
Pars
– Irański dron ratuje tonących. [In Polish: Pars – the Iranian drones that save
lives]. 2016. Available at:
http://www.swiatdronow.pl/pars-iranski-dron-ratuje-tonacych.
5.
Instrukcja o postępowaniu w sprawach poważnych wypadków, wypadków i
incydentów na liniach kolejowych. [In Polish: Instructions on the proceedings in cases of
serious accidents, accidents and incidents on railway lines]. 2016.
Available at http://www.plk-sa.pl/files/public/user_upload/pdf/Akty_prawne_i_przepisy/Instrukcje/Wydruk/Ir-8_od_01.01.2016.pdf.
6.
“Kolejowe
przewozy towarowe w Polsce”. [In Polish: “Rail freight in Poland”]. 2016.
Available at:
http://www.utk.gov.pl/pl/analizy-i-monitoring/statystyka-roczna/przewozy-towarowe/7478,Dane-podstawowe.html.
7.
“Przewozy
ładunków niebezpiecznych 2012-2014”. [In Polish: “Transportation of dangerous
cargo 2012-2014”]. 2016. Available at:
http://www.utk.gov.pl/pl/analizy-i-monitoring/statystyka-roczna/przewozy-towarowe/6541,Przewozy-ladunkow-niebezpiecznych-2012-2014.html.
8.
“Polskie
katastrofy drogowe”. [In Polish: “Polish road crashes”]. 2016. Available at:
http://nasygnale.pl.
9.
Transport - wyniki działalności w
2014 r. [In Polish:
Transport – activity results in 2014].
2016. Available at: http://stat.gov.pl/files/gfx/portalinformacyjny/pl/defaultaktualnosci/5511/9/14/1/transport_wyniki_dzialalnosci_2014.pdf.
10.
Wykonywanie zadań przez
administrację publiczną w zakresie bezpieczeństwa przewozu towarów
niebezpiecznych. [In
Polish: Public administration performance
in the safe transport of dangerous goods]. 2016. Available at:
https://www.nik.gov.pl/plik/id,3552,vp,4524.pdf.
11.
Zasady organizacji ratownictwa chemicznego i ekologicznego w Krajowym
Systemie Ratowniczo-Gaśniczym. [In Polish: Principles of organization
of chemical and ecological rescue in the National Rescue and Fire Rescue System]. 2016. Available at:
http://www.straz.czestochowa.pl/files/file/osp/zasady%20organizacji%20ratownictwa%20lipiec%202013/Zasady_ratownictwo_chemiczne.PDF.
12.
“Zderzenie cystern w
Gutkowie k. Olsztyna”. [In Polish: “Train collision Gutkowo, near Olsztyn”].
2016. Available at:
http://wiadomosci.onet.pl/olsztyn/zderzenie-cystern-w-gutkowie-k-olsztyna/9mn9j.
13.
Hosseinpour Mehdi, Ahmad Shukri Yahaya, Ahmad Farhan
Sadullah, Noriszura Ismail, Seyed Mohammad Reza Ghadiri. 2016. “Evaluating the
effects of road geometry, environment, and traffic volume on rollover crashes”.
Transport, Vol. 31, Issue 2: 221-232.
DOI: http://dx.doi.org/10.3846/16484142.2016.1193046. ISSN: 1648-4142.
Received 03.12.2016;
accepted in revised form 21.02.2017
![]()
Scientific Journal of Silesian University of
Technology. Series Transport is licensed under a Creative Commons
Attribution 4.0 International License