Article citation info:
Jafernik, H. The test
programme concerning aircraft positioning and traffic monitoring – part I. Scientific Journal of Silesian University of Technology. Series
Transport. 2016, 90,
91-98. ISSN: 0209-3324. DOI: 10.20858/sjsutst.2016.90.8.
Henryk JAFERNIK[1]
THE TEST
PROGRAMME CONCERNING AIRCRAFT POSITIONING AND TRAFFIC MONITORING – PART
I
Summary. The article
presents results of the researches of the range to determine of the
transmission’s data with using of the standard modems UHF Satellite on the
transmission frequency of the 460 MHz and the regulating power 1-10W. Because
of this reason there was created programme of the researches in the air. The
researches revealed the possibility increase a range of monitoring and
coordination of the airships on the distance of 80-120 km.
Keywords: modem, monitoring, range
PROGRAM
PRÓB W LOCIE W ZAKRESIE OKREŚLANIA POZYCJI
I MONITOROWANIA RUCHU STATKÓW POWIETRZNYCH – CZĘŚĆ I
Streszczenie. Artykuł prezentuje wyniki badań w zakresie wyznaczania zasięgu transmisji danych przy użyciu standardowych modemów UHF Satelline na częstotlwości transmisji 460 MHz i mocy regulowanej 1-10 W. W tym celu został stworzony program badań w powietrzu Badania wykazały możliwość zwiększenia zasięgu monitorowania i koordynowania ruchu statków powietrznych na odległość 80-120 km.
Słowa kluczowe: modem, monitorowanie, zasięg
1. WSTĘP
W konstrukcji programu prób w locie przyjęto, że wykonane badania z użyciem statków powietrznych powinny dostarczyć danych pomiarowych do określenia:
- dokładności zobrazowania ruchu statków powietrznych na ziemi i w powietrzu,
- zasięgu w jakim monitorowanie ruchu statków powietrznych zachowuje praktycznie użyteczną dokładność i ciągłość zobrazowania ruchu i zarządzania nim,
- ciągłości
zobrazowania ruchu statków powietrznych na ziemi i w powietrzu umożli-wiającej
skuteczne i bezpieczne zarządzanie tym ruchem na podstawie zobrazowania
w systemie.
Dla realizacji tych zadań stworzono system monitorowania ruchu statków powietrznych składający się z trzech podstawowych komponentów funkcjonalnych:
- podsystemu pozycjonowania – pokładowych odbiorników GNSS, rozmieszczonych na statkach powietrznych i pojazdach naziemnych,
- podsystemu transmisji danych na statkach powietrznych, na pojazdach naziemnych i w centrach kierowania,
- podsystemu zobrazowania danych i zarządzania akcją (np. ratowniczą, sytuacją kry-zysową).
Badanie zasięgu polega na określeniu odległości od naziemnego stanowiska kierowania (centrum kierowania CK) do (od) jakiej możliwe jest:
- zobrazowanie pozycji monitorowanego statku powietrznego,
- wymiana danych, niezbędnych do zarządzania lotem.
Zasięg, w jakim system umożliwia monitorowanie ruchu statków powietrznych, zacho-wując praktycznie użyteczną dokładność i ciągłość zobrazowania ruchu oraz możliwość zarządzania tym ruchem, jest badany dla:
a) pojedynczych statków powietrznych i pojazdów znajdujących się w ruchu, monitoro-wanych z:
- mobilnego naziemnego stanowiska kierowania lub
- stacjonarnego,
b) wielu statków powietrznych znajdujących się w ruchu, monitorowanych z naziemnego stanowiska kierowania, z których jeden spełnia funkcje retranslatora.
Zasięg badano na wybranych wysokościach lotu: 150 m, 300 m, 500 m i 900 m.
2. BADANIE HISTEREZY ZASIĘGU
MONITOROWANIA RUCHU STATKU POWIETRZNEGO
Poszczególne zadania zrealizowano przez rozwiązywanie 3 oddzielnych bloków proble-mowych. Te bloki problemowe to:
- badanie histerezy zasięgu monitorowania,
- badanie zasięgu monitorowania ruchu statku powietrznego,
- badania dokładności, dostępności, ciągłości oraz wiarygodności systemu monitorowania ruchu statków powietrznych.
Badanie histerezy zasięgu monitorowania ruchu statku powietrznego przeprowadzono w locie o zmiennym profilu. Przyjęto prędkość przelotową statku powietrznego – 240 km/godz. i maksymalny zasięg 100 km, wysokość lotu od 0 do 900 m.
Uwarunkowania szczegółowe testu:
1. Po oszacowaniu czas lotu (80 min.) przyjęto prędkość przelotową statku powietrznego – 240 km/godz. i maksymalny zasięg 100 km. Przy innych wartościach prędkości i zasięgu, czas lotu może różnić się od podanej wartości.
2. Lot może być wykonany z wykorzystaniem DGPS i (lub) bez DGPS – odpowiednio do potrzeb.
3. W wypadku zmiany miejsca zabudowy anteny urządzeń podsystemu transmisji danych lub istotnej zmiany właściwości anteny, zadanie należy wykonać ponownie.
Opis realizacji zadania
Po starcie statek powietrzny należy wyprowadzić nad punkt przy CK, w którym znajduje się antena podsystemu transmisji danych i przelecieć go z kursem odpowiadającym kierunkowi, na którym badany będzie zasięg monitorowania pozycji statku powietrznego i zasięg transmisji danych zarządzania ruchem tego statku w locie. Kryterium wyboru kierunku stanowi możliwość wykonania lotu na pełny zasięg ze zmianami wysokości od 150 m do 900 m.
Rys. 1. Schemat profilu lotu statku powietrznego SP1 w locie od CK (linia ciągła) i do CK (linia przerywana)
Statek powietrzny nad anteną podsystemu transmisji danych powinien mieć wysokość 150 m od poziomu terenu, na którym ona jest umieszczona. Lot należy wykonywać po prostoliniowej trasie od punktu CK w kierunku punktu 1 (w pierwszym locie, w kolejnych odpowiednio do punktu 3 lub 5 lub 7) do momentu stwierdzenia utraty transmisji danych o pozycji statku powietrznego lub utraty transmisji danych do zarządzania ruchem tego statku (zależnie od tego, która utrata wystąpi wcześniej). Od pozycji utraty transmisji danych na wysokości 150 m należy rozpocząć procedurę z nawrotem i dwoma zakrętami po 180°, z jednoczesnym naborem wysokości do 300 m. Czas lotu na kursie przeciwnym – 2 min. Po powrocie na pozycję utraty transmisji danych, teraz z wysokością 300 m, i po upewnieniu się o wznowieniu transmisji, kontynuować lot prostoliniowy w kierunku punktu 1 na tej wysokości do momentu stwierdzenia utraty transmisji danych o pozycji statku powietrznego lub utraty transmisji danych do zarządzania ruchem tego statku (zależnie od tego, która utrata wystąpi wcześniej). Od pozycji utraty transmisji danych na wysokości 300 m należy rozpocząć następną procedurę z nawrotem i dwoma zakrętami po 180°, z jednoczesnym naborem wysokości do 500 m. Czas lotu na kursie przeciwnym – 2 min. Po powrocie na pozycję utraty transmisji danych, teraz z wysokością 500 m, i po upewnieniu się o wznowieniu transmisji, kontynuować lot prostoliniowy w kierunku punktu 1 na tej wysokości, do momentu stwierdzenia utraty transmisji danych o pozycji statku powietrznego lub utraty transmisji danych do zarządzania ruchem tego statku (zależnie od tego, która utrata wystąpi wcześniej). Od pozycji utraty transmisji danych na wysokości 500 m należy rozpocząć kolejną procedurę z nawrotem i dwoma zakrętami po 180°, z jednoczesnym naborem wysokości do 900 m. Czas lotu na kursie przeciwnym – 2 min. Po powrocie na pozycję utraty transmisji danych, teraz z wysokością 900 m, i po upewnieniu się o wznowieniu transmisji, kontynuować lot prostoliniowy w kierunku punktu 1 na tej wysokości, do momentu stwierdzenia utraty transmisji danych o pozycji statku powietrznego lub utraty transmisji danych do zarządzania ruchem tego statku (zależnie od tego, która utrata wystąpi wcześniej). Jeśli w czasie 3 min lotu od tego momentu (bez zmiany warunków lotu) nie nastąpi wznowienie transmisji danych, wykonać zakręt w kierunku punktu 2, bez zmiany wysokości. Po wykonaniu tego zakrętu kontynuować lot na wysokości 900 m po trasie do punktu 2.
Rys. 2. Schemat profilu lotu statku powietrznego SP1
Przed punktem 2 wykonać zakręt na odcinek trasy od punktu 2 do punktu CK i upewnić się o braku transmisji danych. Po wznowieniu transmisji danych na tej wysokości i ustabilizowaniu tej transmisji, zmniejszyć energicznie wysokość do 500 m i upewnić się o utracie transmisji. Kontynuować lot na wysokości 500 m po trasie z kursem do CK. Po wznowieniu transmisji danych na tej wysokości i ustabilizowaniu tej transmisji, zmniejszyć energicznie wysokość do 300 m i upewnić się o utracie transmisji. Kontynuować lot na wysokości 300 m po trasie z kursem do CK. Po wznowieniu transmisji danych na tej wysokości i ustabilizowaniu tej transmisji, zmniejszyć energicznie wysokość do 150 m i upewnić się o utracie transmisji. Kontynuować lot na wysokości 150 m z kursem do CK. Po wznowieniu transmisji danych na tej wysokości i ustabilizowaniu tej transmisji można rozpocząć manewrowanie do zakończenia lotu.
Po
cyklu badań z CK przeprowadzono badania z MCK. W tym przypadku po starcie
statek powietrzny należy wyprowadzić nad MCK, w którym znajduje się antena
podsystemu transmisji danych i przelecieć go z kursem odpowiadającym
kierunkowi, na którym badany będzie zasięg monitorowania pozycji statku
powietrznego i zasięg transmisji danych zarządzania ruchem tego statku w locie. Opracowane do realizacji badań urządzenia
wraz z ich oprogramowaniem pozwoliły na przeprowadzenie badań i
zgromadzenie materiałów do weryfikacji przyjętych założeń. Jeden z
trudniejszych elementów do rozwiązania stanowiła kwestia transmisji danych
pomiędzy użytkownikami systemu. Niezawodność, odpowiedni zasięg stanowią o
użyteczności i przydatności badanego systemu.
3. BADANIA ZASIĘGU PRZESYŁANIA DANYCH
Zgodnie
z przyjętymi założeniami, przeprowadzono badania zasięgu przesyłania danych za
pomocą różnych rodzajów mediów. Warunek suwerenności mediów zadecydował o przyjęciu
do transmisji danych łączności radiowej w zakresie fal UHF. Telefonię GSM
potraktowano jako zapasową (awaryjną). W czasie testów użyto standardowych
modemów UHF Satelline na częstotliwości transmisji 460 MHz i mocy regulowanej
od 1 do 10 W. Modemy te zamontowano zarówno w samolotach, jak i w samochodach.
Następnie wykonano wiele jazd i lotów testowych w celu określenia zasięgu
poprawnej transmisji danych zgodnie z opra-cowanym programem lotów
testowych. Poniższe schematy przedstawiają zarejestrowane zasięgi dla
nadajników o mocach 1W i 10 W.
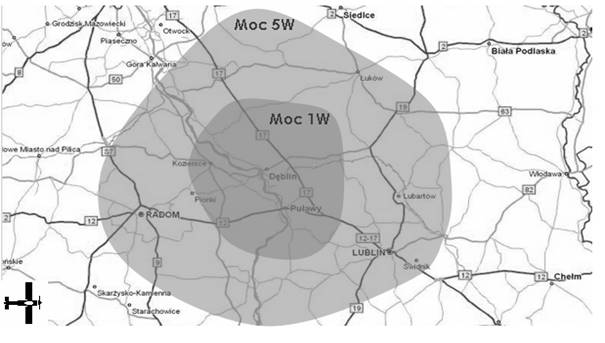
Rys. 3. Zasięg transmisji danych w relacji samolot-stacja
naziemna, moc 1 i 5 W
(wysokość lotu – 300 m)
Loty
testowe wykonano na wysokościach od 100 do 1000 m. Wybór tego przedziału
wysokości argumentowano faktem najczęstszego wykonywania lotów przez lotnictwo
ogólne i przez lotnictwo służb porządku publicznego. Lotnictwo liniowe, poza
elementem podejść końcowych i procedur odlotowych na ogół z tych przedziałów
wysokości nie korzysta. Nie ma więc kolizji interesów pomiędzy poszczególnymi
użytkownikami przestrzeni powietrznej. Ponadto należy zwrócić uwagę, że właśnie
na tych wysokościach najtrudniej o wsparcie systemów radionawigacyjnych, a
nawet systemów satelitarnych (szczególnie poza linią Wisły). Fakt ten będzie utrudniał
monitoring obiektów oraz możliwość zarządzania ruchem większej liczby obiektów
w tym rejonie.
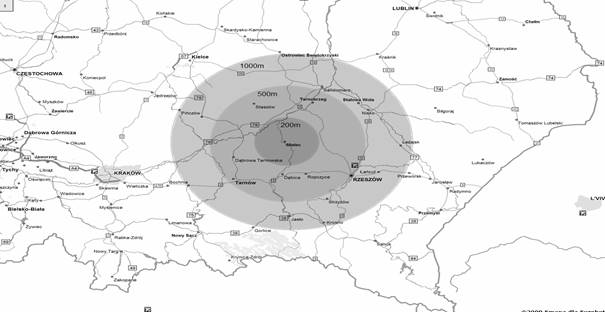
Rys. 4. Zasięg transmisji danych w relacji
samolot − stacja naziemna, moc 10 W
Uzyskane
wykresy zasięgów odnoszą się do tego typu rejonów Prezentowane na rysunkach 5 i
6 zasięgi zostały obliczone dla samolotu Cessna 172, samolotu Piper Seneca PA34-200T
oraz samochodu Nissan Pathfinder, przy prędkości transmisji 19200 bps. W testach
wykorzystano modulację FSK, pasmo 25 kHz, typ emisji F1D. Z rysunków widać, że zasięg systemu
monitorowania ruchu obiektów z wykorzystaniem GNSS-u jest w miarę równy we
wszystkich kierunkach, zarówno dla samolotów, jak i samochodów, i wynosi
odpowiednio dla samolotu przy mocy równej 1W – około 20-25 km, dla mocy równej
5 W – około 50-60 km, natomiast dla samochodu przy mocy równej 1W – około 10-12
km, dla mocy równej 5 W – około 17-20 km. Po zwiększeniu mocy nadajnika do 10 W
uzyskano zasięgi odpowiednio na wysokości 200 m – 40 km, na wysokości 500
m – 60 km oraz na wysokości 1000 m około 80 km. Reasumując, otrzymane zasięgi
mogą być satysfakcjonujące dla samolotu, natomiast w przypadku samochodu należy
wykorzystać retlanslator lub GPRS.
4. WNIOSKI
Wykonanie
lotów i jazd testowych pozwoliło całościowo sprawdzić łącza radiowe w wyznaczaniu
dokładności, ciągłości i dostępności tworzonego systemu. Podczas prac
badawczych zarejestrowano trajektorie lotów samolotów oraz trasy jazd samochodu
nanosząc je na podkład mapowy na bazie siatki WGS84. Uzyskane w ten sposób
charakterystyki posłużyły do analiz dokładnościowych systemu monitorowania
ruchu statków powietrznych
i pojazdów. Loty testowe wykonano z różnych lotnisk zlokalizowanych w terenie
nizinnym (Dęblin, Chełm, Mielec) i górzystym (Nowy Targ).
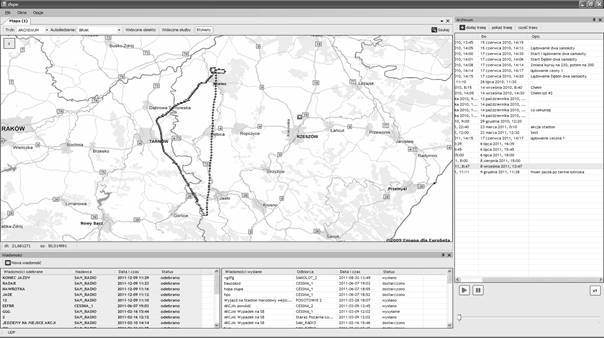
Rys. 5. Rejestracja trasy lotu samolotu Piper
Seneca PA34-200T
(badanie zasięgu transmisji danych)
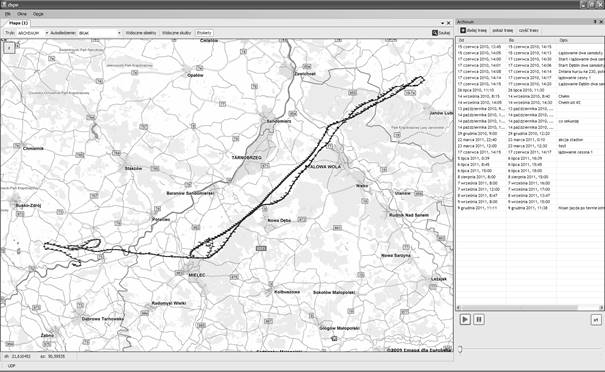
Rys. 6. Rejestracja trasy lotu samolotu Piper
Seneca PA34-200T
(badanie zasięgu transmisji danych)
References
1. Ciećko A., G. Grunwald, R. Kaźmierczak, S. Oszczak, M. Grzegorzewski, J. Ćwiklak. 2011. „Wykorzystanie oprogramowania RTKLIB do badania dokładności systemu EGNOS”. [In Polish: “The use of software RTKLIB to audit the accuracy of EGNOS”]. Logistyka 6: 503-511.
2. Ciećko A., S. Oszczak, M. Grzegorzewski, J. Ćwiklak. 2011. „Wyznaczenie pozycji statku powietrznego oraz dokładności z wykorzystaniem systemu EGNOS w Polsce wschodniej”. [In Polish: “Determination of the position of the aircraft and accuracy with the use of EGNOS in eastern Poland”]. Logistyka 6: 617-624.
3. Ćwiklak J. 2010. „Monitorowanie ruchu statków
powietrznych i pojazdów służb porządku publicznego z wykorzystaniem GNSS - cz. I. [In Polish: „Monitoring
the movement of aircraft and vehicles to law and order with the use of
GNSS – part I]. Logistyka 6: 601-610.
4. Ćwiklak
J., A. Ciećko, S. Oszczak, M. Grzegorzewski, H. Jafernik. 2011. „Wykorzystanie
systemu EGNOS na potrzeby nawigacji lotniczej w Polsce wschodniej”. [In Polish: “The use of EGNOS for
the purpose of air navigation services in Eastern Poland”]. Problemy eksploatacji 1: 57-64.
5. Grunwald
G., R. Kaźmierczak, S. Oszczak, A. Ciećko, M. Grzegorzewski, J. Ćwiklak. 2011.
„Wykorzystanie systemu EGNOS w
nawigacji lotniczej w aspekcie uruchomienia serwisu Safety-Of-Life”. [In
Polish: „The use of EGNOS in air navigation services in the context of
commissioning Safety-Of-Life”]. ABID 16:
133-142.
6. Spits J. “Total Electron Content reconstruction using triple frequency GNSS signals”.
Dissertation thesis. Universitè de Liège, Belgium, 2011.
7. IGS Central Bureau. Available at: ftp://igscb.jpl.nasa.gov/igscb/product/.
Received 23.07.2015; accepted in revised form 29.12.2015
![]()
Scientific Journal of Silesian
University of Technology. Series Transport is licensed under a Creative
Commons Attribution 4.0 International License