Article citation info:
Fellner, A., Fellner, R. Piechoczek E. Pre-flight validation RNAV GNSS
approach procedures for EPKT in “EGNOS APV Mielec project”. Scientific Journal of Silesian University of
Technology. Series Transport. 2016, 90,
37-46. ISSN: 0209-3324. DOI:
10.20858/sjsutst.2016.90.4.
Andrzej FELLNER[1], Radosław FELLNER [2], Eugeniusz PIECHOCZEK[3]
PRE-FLIGHT
VALIDATION RNAV GNSS APPROACH PROCEDURES FOR EPKT IN „EGNOS APV MIELEC PROJECT”
Summary. The
purpose of this document is to show evidence of the work carried out as part of
the pre-flight flight validation activities of one RNAV approach Instrument
Flight Procedures (IFP), down to LPV minima, at Katowice Airport (EPKT). The
document is a deliverable of the TEN-T funded project “Support to the EGNOS APV
Operational Implementation – APV MIELEC”.
Keywords: flight validation, GNSS, aviation,
RNAV, satellite navigation
1. INTRODUCION
In
accordance with ICAO Assembly resolution 37-11 technological developments in
aviation, especially in approaches and validations, will be determined by the
need to implement navigation procedures based on characteristics (Performance
Based Navigation – PBN) and GBAS system.
Partial implementation approach procedures RNAV and RNP contained in
Performance-Based Navigation (PBN) Manual is planned by 2016. EASA plans
implementation of PBN Standard Instrument Departure (SID) / Standard Instrument
Arrival (STAR) 2018., And PBN approach procedures with vertical guidance (APV)
(RNP APCH) to 2024. PBN means Area Navigation (RNAV) based on requirement for
performance monitoring and alerting (Required Navigation Performance RNP) for
aircraft operating along an air traffic service route, on an instrument
approach procedure or in a designated airspace [4]. For example, RNP 1
operations require the Lateral and Longitudinal Total System Error (TSE) to be
within +/– 1 nautical mile for at least 95% of flight time and on-board
performance monitoring, alerting capability and high integrity navigation
databases. With regard to RNP approaches (RNP APCH) the TSE shall be +/– 0,3
nautical mile for at least 95% of flight time for the Final Approach Segment
and on-board performance monitoring, alerting capability and high integrity
navigation databases are required [3].
2. BACKGROUND ON RNAV
APPROACHES
Area Navigation (RNAV) is defined as a method of navigation
that permits aircraft operation on any desired course within the coverage of
station-referenced navigation signals or within the limits of a self contained
system capability, or a combination of these. RNAV was developed to provide
more lateral freedom and thus more complete use of available airspace. This
method of navigation does not require a track directly to or from any specific
radio navigation aid, and has three principal applications:
1.
A
route structure can be organized between any given departure and arrival point
to reduce flight distance and traffic separation;
2. Aircraft can be flown into
terminal areas on varied pre-programmed arrival and departure paths to expedite
traffic flow;
3. Instrument
approaches can be developed and certified at certain airports, without local
instrument landing aids at that airport.
Focusing on the last point, RNAV approaches
can have several descent minima depending on the kind of RNAV approach to be
flown:
·
RNAV (GNSS) NPA (Non Precision
Approach): an approach without
vertical guidance flown to the LNAV MDA/H (Lateral Navigation Minimum Descent
Altitude/Height);
·
APV Baro (Approach with Barometric Vertical guidance): an approach with barometric vertical guidance flown to
the LNAV/VNAV DA/H. APV Baro is a vertically guided approach that can be
flown by modern aircraft with VNAV (Vertical Navigation) functionality using
barometric inputs. Most Boeing and Airbus aircraft already have this capability
meaning that a large part of the fleet is already equipped;
·
APV SBAS (Satellite Based Augmentation
System): An approach with
geometric vertical and lateral guidance flown to the LPV DA/H (Decision Altitude/Decision
Height). APV SBAS is supported by satellite based augmentation systems such as
WAAS (Wide Area Augmentation System) in the US and EGNOS (European
Geostationary Navigation Overlay System) in Europe to provide lateral and
vertical guidance. equivalent to an ILS localizer and the vertical guidance is
provided against
a geometrical path in space rather than a barometric altitude.
The 36th ICAO Assembly in 2007 passed a
resolution encouraging States to implement approach procedures with vertical
guidance (Baro-VNAV and/or SBAS) for all instrument runway ends, either as the
primary approach or as a back-up for precision approaches by 2016.
The use of the European SBAS system – EGNOS
– presents a feasible solution to APV approaches.
The use of the European SBAS system – EGNOS
– presents a feasible solution to APV
approaches:
·
Navigation system
specifically designed for approach operations;
·
Europe coverage;
·
High accuracy and
integrity;
·
Requires no
infrastructure on the aerodromes themselves;
·
Supports autopilot
coupling;
·
Standalone
avionics possible thereby minimising retrofit costs.
The ESSP (European Satellite Service Provider)
has officially declared the start of the EGNOS Safety-of-Life Service as
of today, March 2nd 2011, following EC authorization to provide the service.
Intensive scientific and technological progress
in aviation and flight approaches has been recognized in Poland. Polish Civil Aviation Authority
are interested in the implementation of RNAV approaches in the short term into
some of their airports. However, unlike to USA, France or Germany, in Poland,
IFR navigation based on basic GNSS like GPS (Global Positioning System) is not
currently accepted. The Polish Air Navigation Services Agency (PANSA)
participates in this study by providing reports of the EGNOS SIS performance
using a receiver installed on-ground. Royal Star Aero participates in the
flight validation campaign directly by providing an aircraft. The pilots
involved are IFR (Instrumental Flight Rules) licensed and are Royal Star Aero
staff too.
3. PRE-FLIGHT
VALIDATION RNAV GNSS APPROACH PROCEDURES
Research was conducted within the framework of the
“Support to the EGNOS APV Operational Implementation – APV MIELEC” programme. Firstly,
to the project were chosen two airports: Mielec Airport (EPML) as General
Aviation airport and Katowice Airport (EPKT). During preparation to validation it
turned out that EPML does not meet the requirements adopted in project and its
infrastructure is unprepared to performing validation. That is why only EPKT
was fully fledged participant at these project. Pre-flight validation was
performed in line with ICAO Doc 9906 volume 5 “Validation of Instrument Flight
Procedures”, which provides guidance for conducting validation of instrument
flight procedures, including safety, flyability and design accuracy [8].
Table
1
List of waypoints
|
Waypoints list |
||||
|
Fixes |
WP |
Coordinates (WGS84) |
||
|
IAF |
KT001 |
503305,92 N |
0192423,32 E |
50.55164 N, 19.40648 E |
|
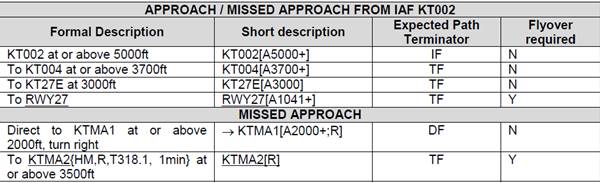
KT002 |
502823,46 N |
0192930,64 E |
50.47318 N, 19.49184 E |
|
|
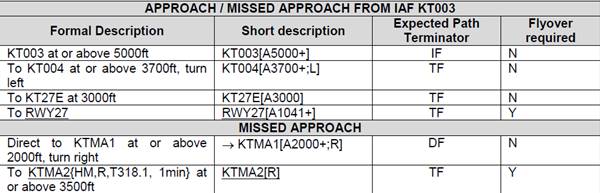
KT003 |
502342,71 N |
0192420,00 E |
50.3952 N, 19.40556 E |
|
|
IF |
KT004 |
502824,67 N |
0192141,05 E |
50.47352 N, 19.3614 E |
|
FAP |
KT27E |
502825,63 N |
0191515,99 E |
50.47379 N, 19.25444 E |
|
LTP |
RW27 |
502827,19 N |
0190538,65 E |
50.47422 N, 19.09407 E |
|
|
KTMA1 |
502828,37 N |
0185730,00 E |
50.47455 N, 18.95833 E |
|
|
KTMA2 |
503936,46N |
0184148,88 E |
50.66013 N, 18.69691 E |
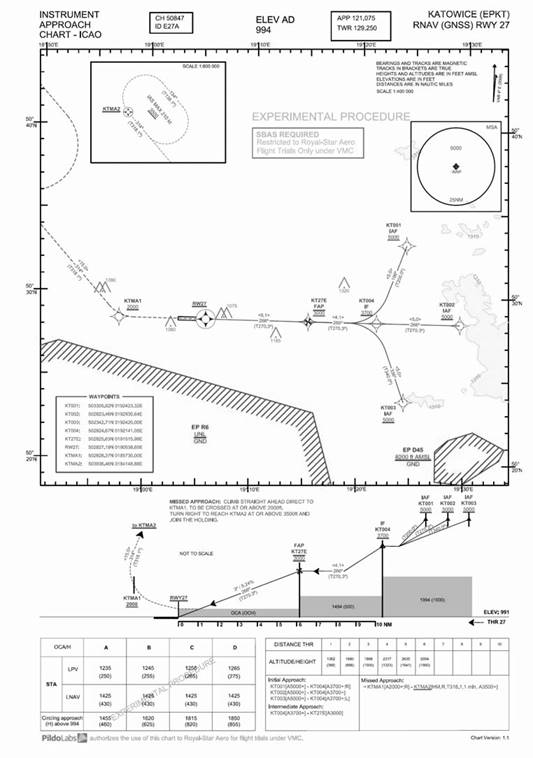
Fig. 1. Procedure
chart designed for EPKT
Table 2
Path terminators
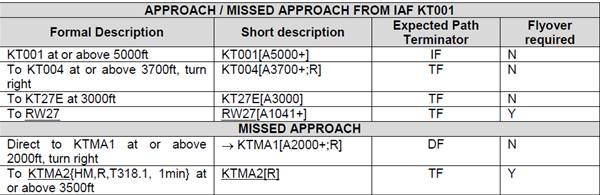
The review of the IFP (Instrument Flight
Procedure) design package has been performed together with PANSA and PILDO. The
main outcomes are:
·
It has been
confirmed the application of the criteria specified in PANS-OPS [7];
·
It has been
confirmed the data accuracy and integrity;
·
The Terrain maps
used (Digital Terrain Model from SRTM with 90 m accuracy) are accepted by
Polish Authorities;
·
The controlled
obstacles around the airport were provided by the airport. They were accepted
by PANSA for the design.
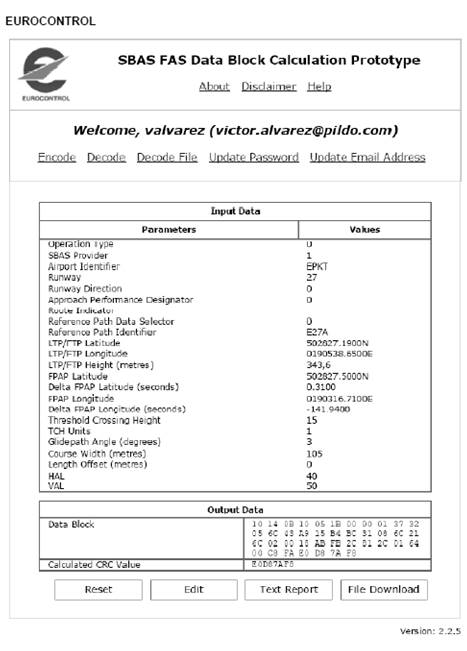
Fig. 2. Final Approach Segment datablock input data
The reviewers involved realised that one of
the obstacles (ID#79) was not well referenced. This entailed a substantial
reduction of the LPV (Localizer Performance with Vertical guidance) minima
value. The charts were corrected accordingly prior to the flight trials.
There is a slight deviation of the criteria
concerning the position where the FPAP (Flight Path Alignment Point) has been
located. In Katowice the ILS localizer (LOC) is located more than 305 meters
from THR09. Thus the position of the FPAP should be the one specified in the
following Fig. 4.
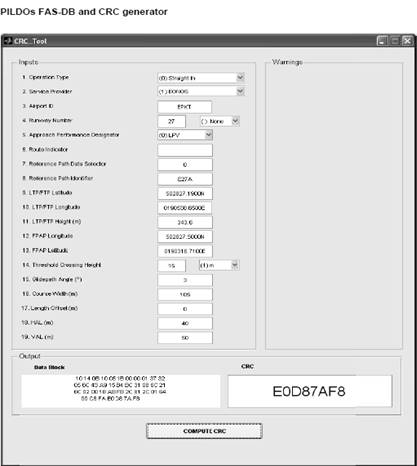
Fig. 3. Procedure chart for EPKT
Fig. 4. FPAP location, ILS localizer
more than 305 m from the runway end
The codification performed considered that the localizer was located at 305 m. Therefore the FPAP was coded in threshold 09 (THR09) position, being the length offset nil. However, it is not an important issue operationally speaking. The horizontal deviations that the pilot obtains are not exactly the same that the ones that would be obtained flying the existing ILS (Instrumental Landing System) procedure. Fig. 4 shows this small difference.
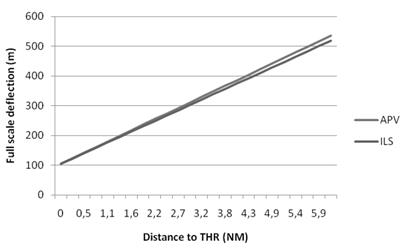
Fig. 5. Difference between the Full
Scale Deflection of the ILS with respect to the APV
A Jeppesen coding screenshot is provided in
order to validate the coding of the database used in the aircraft. Furthermore,
it is provided two screenshots with the results of the CRC (Cyclic Redundancy
Check) generation and Final Approach Segment Datablock:
·
One using the
online application developed by EUROCONTROL;
·
Another using the
in-house tool developed by PILDO LABS in accordance with DO-229D.
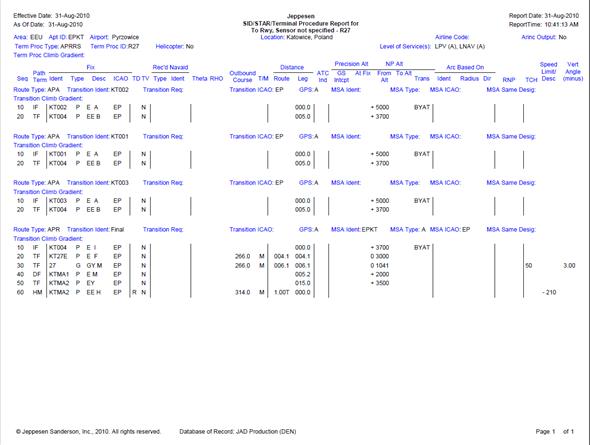
Fig. 6. Jeppesen
screenshots
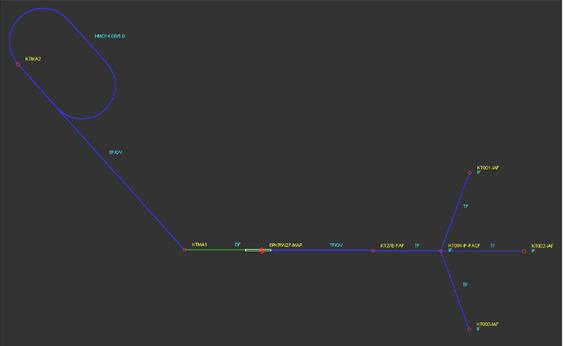
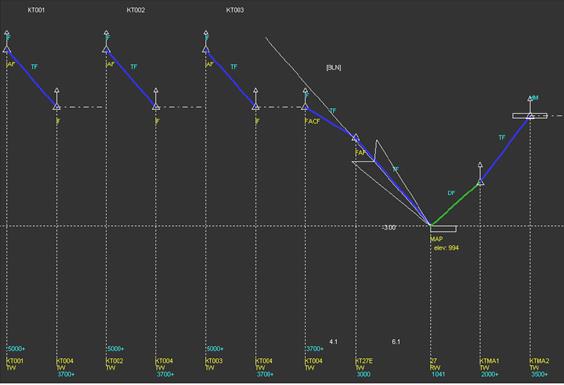
Fig. 7. Jeppesen screenshots
4. CONCLUSION
Intensive
scientific and technological progress in aviation raises the need of using
simulators in training of pilots and air traffic controllers new RNAV and
RNP procedures. Such procedures are recommended by ICAO, as well as EUROCONTROL
and EASA. That is why these organizations are working on implementation
Performance-Based Navigation. Research project “Support to the EGNOS APV
Operational Implementation – APV MIELEC” proved that pre-flight validation of
specific types of precision approach at Polish airport is possible. It shows
that implementation RNAV GNSS approaches
requires:
-
geodesic
survey of navigation points (also waypoints);
-
implementation
of NPA at General Aviation airports and aerodromes requires possession of a lights
system;
-
system
of RNAV GNSS approaches must be designed and manufactured by overlines method
on the standard radionavigation systems (NDB, ILS).
Nowadays,
approach procedures in Poland are designed by PANSA, which are also responsible
for include them into Aeronautical Information Publication (AIO Poland).
References
1.
APV
SBAS Approach – Concept of
Operations 1.0. 28/01/2009.
2.
DO-229D/2006.
Minimum Operational Performance Standards
for Global Positioning System/Wide Area Augmentation System Airborne Equipment.
Washington: Radio Technical Commission for Aeronautics.
3.
European
Commission. 2014. Implementing regulation
(EU) No 716/2014 of 27 June 2014 on the establishment of the Pilot Common
Project supporting the implementation of the European Air Traffic Management
Master Plan, Brussels.
4.
ICAO.
Doc 9613 Performance-based Navigation (PBN) Manual, fourth edition.
Montreal.
5.
MIELEC_CA
MIELEC Consortium Agreement 1.0.
6.
MIELEC
D3 GPS NPA and APV-I Procedure Design 2.0.
7.
ICAO.
2006. Doc 8168 Procedures for Air
Navigation Services Aircraft Operations. Volume II – Construction of
Visual and Instrument Flight Procedures. Montreal.
8.
TechPro
MIELEC Technical Proposal 1.0
9. ICAO. 2012. Doc 9906 Quality Assurance Manual for Flight Procedure Design. Volume 5 – Flight
Validation of Instrument Flight Procedures. Montreal.
Received 13.08.2015; accepted in revised form 25.11.2015
![]()
Scientific Journal of Silesian
University of Technology. Series Transport is licensed under a Creative
Commons Attribution 4.0 International License