Article citation info:
Batsch, M. Surface strength of Novikov convexo-concave gears. Scientific Journal of Silesian University of Technology. Series Transport. 2016, 90, 17-24. ISSN: 0209-3324. DOI: 10.20858/sjsutst.2016.90.2.
Micha� BATSCH[1]
SURFACE STRENGTH OF NOVIKOV CONVEXO-CONCAVE GEARS
Summary. Article presents the algorithm for obtaining
maximum surface stresses for Novikov gears. Described surface strength
calculation method is based on� Hertz
theory of two bodies being in point contact. What�s more the influence of
gear position errors on maximum contact stresses has been presented. Also the
comparison of Hertz stresses for Novikov and involute gears has been made.
Keywords: surface strength, Novikov
convexo-concave gear, Hertz theory, deviation
NO�NO�� POWIERZCHNIOWA PRZEK�ADNI Z�BATYCH O KO�OWO-�UKOWYM ZARYSIE Z�B�W TYPU NOWIKOWA
Streszczenie. Artyku� przedstawia algorytm wyznaczania maksymalnych napr�e� stykowych dla przek�adni z�batych typu Nowikowa. Opisywana metoda oblicze� wytrzyma�o�ciowych na naciski opiera si� na zastosowaniu klasycznej teorii Hertza dla styku punktowego dw�ch dowolnych cia�. Ponadto przedstawiono wp�yw b��d�w po�o�enia osi k� przek�adni na wielko�� nacisk�w powierzchniowych. Dokonano r�wnie� por�wnania napr�e� uzyskanych w wyniku zastosowania wzor�w Hertza dla przek�adni Nowikowa i ewolwentowej.
S�owa kluczowe: no�no�� powierzchniowa, przek�adnia z�bata Nowikowa o ko�owo-�ukowym zarysie z�b�w, teoria Hertza, odchy�ki
1. WPROWADZENIE
W artykule opisano metod� pozwalaj�c� na wyznaczenie napr�e� stykowych k� przek�adni Nowikowa. Metoda ta bazuje na klasycznym podej�ciu, opartym na teorii Hertza [2], z kt�rego korzystano w pracach [1, 4]. Ponadto wyznaczono wp�yw b��d�w monta�u przek�adni na wielko�� nacisk�w powierzchniowych oraz por�wnano wytrzyma�o�� stykow� przek�adni Nowikowa z wytrzyma�o�ci� stykow� przek�adni ewolwentowej.
2. Wyznaczanie napr�e� stykowych wg Hertza
���� Styk z�b�w przek�adni Nowikowa jest punktowy. Pod wp�ywem dzia�ania si� z�by odkszta�caj� si�, a styk odbywa si� na pewnej powierzchni, zazwyczaj ograniczonej elips�. Niniejszy rozdzia� stanowi opis toku postepowania w przypadku wyznaczania napr�e� stykowych wg Hertza dla punktowego styku z�b�w przek�adni Nowikowa.
W celu wyznaczenia napr�e� nale�y rozwa�y� dwie stykaj�ce si� powierzchnie, pokazane na rysunku 1.
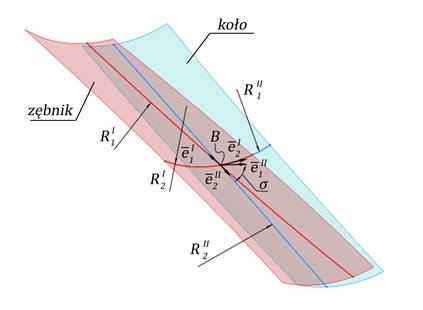
Rys. 1. Styk punktowy powierzchni bocznych z�b�w przek�adni Nowikowa
���� Stykaj�ce si� powierzchnie opisane s� za
pomoc� g��wnych promieni krzywizn. K�t ![]() �jest to k�t pomi�dzy odpowiednimi kierunkami
g��wnymi powierzchni. W otoczeniu punktu styku B stykaj�ce si� powierzchnie mo�na opisa� paraboloidami o
r�wnaniach [1]:
�jest to k�t pomi�dzy odpowiednimi kierunkami
g��wnymi powierzchni. W otoczeniu punktu styku B stykaj�ce si� powierzchnie mo�na opisa� paraboloidami o
r�wnaniach [1]:
|
|
(1) |
|
|
(2) |
gdzie:
![]() ,
, ![]() �� odpowiednio promienie krzywizn g��wnych
− pierwszej i drugiej − powierzchni bocznej z�ba z�bnika,
�� odpowiednio promienie krzywizn g��wnych
− pierwszej i drugiej − powierzchni bocznej z�ba z�bnika,
![]() ,
, ![]() �� promienie krzywizn g��wnych − pierwszej
i drugiej − powierzchni bocznej z�ba ko�a.
�� promienie krzywizn g��wnych − pierwszej
i drugiej − powierzchni bocznej z�ba ko�a.
���� Odleg�o�� pomi�dzy powierzchniami mierzona wzd�u� osi z, pokrywaj�cej si� ze wsp�ln�, normaln� obydwu powierzchni wyra�a si� wzorem:
|
|
��������� (3) |
���� Osie uk�adu wsp�rz�dnych obiera si� tak, aby wsp�czynnik C przyj�� warto�� zero. Jest to spe�nione, gdy:
|
|
��������� (4) |
���� Rozwi�zuj�c uk�ad r�wna� (4) mo�na wyznaczy� wsp�czynniki A i B w postaci (5)
|
|
(5) |
���� W�wczas odleg�o�� pomi�dzy powierzchniami wyra�a si� wzorem (6):
|
|
��������� (6) |
gdzie
![]() �to g��wne, wzgl�dne promienie krzywizn.
�to g��wne, wzgl�dne promienie krzywizn.
���� Dla tak opisanej, w otoczeniu punktu styku, geometrii rozk�ad napr�e� jest p�elipsoid� o r�wnaniu (7):
|
|
��������� (7) |
 ,
,gdzie:
ae, be � to odpowiednio ma�a i wielka osie elipsy styku,
![]() �� maksymalne napr�enia stykowe.
�� maksymalne napr�enia stykowe.
���� Parametry obszaru styku ae i be okre�la si� rozwi�zuj�c r�wnanie (8):
|
|
��������� (8) |
 ,
,gdzie:
K(e) � zupe�na ca�ka eliptyczna drugiego rodzaju,
E(e) � zupe�na ca�ka eliptyczna pierwszego rodzaju,
![]() �� argument ca�ki.
�� argument ca�ki.
���� R�wnanie (8) mo�na rozwi�za� numerycznie, np. metodami Newtona
lub bisekcji. Po jego rozwi�zaniu znany jest stosunek wielkiej osi elipsy styku
do osi ma�ej be/ae.
Nast�pnie, wykorzystuj�c zale�no�� (9) oblicza si� o� wielk� elipsy styku:
|
|
��������� (9) |
 ,
,gdzie:
Re � r�wnowa�ny promie� krzywizny okre�lony zale�no�ci� (10)
|
|
��������� (10) |
gdzie:
F1(e) − wsp�czynnik zale�ny od stosunku be/ae, wyra�ony wzorem (11)
|
|
��������� (11) |
 ,
,gdzie:
E* − zast�pczy modu� Younga, okre�lony r�wnaniem (12)
|
|
��������� (12) |
gdzie:
E1, E2 � modu�y Younga materia�u odpowiednio z�bnika i ko�a,
ν1, ν2 � wsp�czynniki Poissona materia�u odpowiednio z�bnika i ko�a.
���� Znaj�c stosunek osi wielkiej do osi ma�ej elipsy styku, wyznaczony jako rozwi�zanie r�wnania (8), oraz o� wielk�, okre�lon� r�wnaniem (9) mo�na wyznaczy� o� ma�� jako (13):
|
|
��������� (13) |
Maksymalne napr�enia wyst�puj�ce w punkcie styku okre�la zale�no�� (14):
|
|
��������� (14) |
gdzie P to si�a obwodowa.
���� Z uwagi na przetaczanie si� punktu styku i
poskokowy wska�nik przyporu si�a ta zmienia swoj� warto��. Zatem dla przek�adni
o poskokowym wska�niku przyporu mieszcz�cym si�
w granicach od 1 do 2 w celu obliczenia napr�e� stykowych w po�owie szeroko�ci
wie�ca we wzorze (14) nale�y przyj�� nominaln� maksymaln� warto�� si�y
obwodowej. Si�a ta jest w�wczas przenoszona przez jeden z�b. W przypadku
innego po�o�enia punktu styku si�a obwodowa mo�e by� przenoszona przez dwa
z�by, w�wczas mo�na j� zmniejszy� dwa razy.
3. Wp�yw b��d�w monta�u przek�adni na wielko��
napr�e� stykowych
���� Jak wynika z przeprowadzonej analizy styku z�b�w przek�adni Nowikowa [3], w kt�rej uwzgl�dniono b��dy po�o�enia osi, punkt styku zmienia swoje po�o�enie na powierzchni bocznej z�ba w stosunku do swojego po�o�enia dla przek�adni bezodchy�kowej. Zmieniaj� si� w�wczas krzywizny oraz kierunki g��wne w punkcie styku, kt�re s� zale�ne od parametr�w powierzchni, definiuj�cych po�o�enie tego punktu. Wobec powy�szego mo�na si� spodziewa� zmiany wielko�ci nacisk�w powierzchniowych. Aby je wyznaczy�, nale�y zastosowa� metod� Hertza (opisan� w rozdziale 2) z wykorzystaniem nowych, g��wnych promieni krzywizn i nowego k�ta pomi�dzy kierunkami g��wnymi powierzchni. Wielko�ci te wyznacza si� z wykorzystaniem parametr�w powierzchni, uzyskanych w wyniku analizy styku z�b�w, kt�ra uwzgl�dnia b��dy po�o�enia osi przek�adni.
���� Rysunek 2 przedstawia wp�yw b��du rozstawienia osi k� na wielko�� nacisk�w powierzchniowych dla przyk�adowej przek�adni Nowikowa, obci��onej momentem obro-towym M1=550 Nm.
���� W przypadku uwzgl�dnienia jedynie b��du rozstawienia osi k�, naciski s� takie same na ca�ym obszarze ruchu punktu styku. Im b��d ten zwi�ksza si�, tym naciski staj� si� mniejsze. Zjawisko to mo�na wyja�ni� spadkiem rzeczywistego k�ta przyporu, a co za tym idzie �przesuni�ciem si� punktu styku ku stopie z�ba z�bnika, gdzie zmniejsza si� stosunek �rednich g��wnych promieni krzywizn. Przy projektowaniu przek�adni Nowikowa nale�y uwzgl�dni� b��d rozstawienia osi oraz celowo zwi�kszy� k�t przyporu lub stosunek promienia zarysu z�bnika do jego promienia podzia�owego, co pozwala na zmniejszenie napr�e� stykowych oraz kontrol� nad po�o�eniem obszaru styku. Nale�y r�wnie� zaznaczy�, �e zbyt du�y b��d rozstawienia osi mo�e w efekcie prowadzi� do zwi�kszenia napr�e�, w wyniku ich koncentracji spowodowanej kraw�dziowaniem �ladu styku.
Rys. 2. Zale�no�� nacisk�w powierzchniowych od b��du rozstawienia osi
���� Na rysunku 3 przedstawiono wp�yw b��du przekoszenia osi dla symetrycznego po�o�enia przek�adni wzgl�dem podp�r.
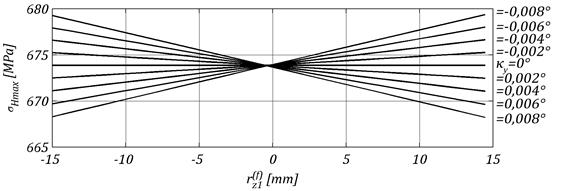
Rys. 3.
Zale�no�� nacisk�w powierzchniowych od po�o�enia punktu styku
oraz b��du przekoszenia osi
���� Naciski zwi�kszaj� si� lub zmniejszaj� w
zale�no�ci od znaku k�ta ![]() , pocz�wszy od wej�cia w
zaz�bienie a� do wyj�cia z zaz�bienia.
, pocz�wszy od wej�cia w
zaz�bienie a� do wyj�cia z zaz�bienia.
4. Por�wnanie napr�e� stykowych przek�adni
ewolwentowej oraz Nowikowa
���� W niniejszym rozdziale por�wnano teoretyczne napr�enia wg Hertza dla przek�adni ewolwentowej oraz Nowikowa. Napr�enia stykowe dla przek�adni Nowikowa obliczono w po�owie szeroko�ci wie�ca metod� z rozdzia�u 2., bez uwzgl�dnienia b��d�w po�o�enia osi. Napr�enia dla przyk�adowej przek�adni ewolwentowej wyznaczono bazuj�c na znanym wzorze (15) [6, 5].
|
|
��������� (15) |
���� Rysunek 4 przedstawia zale�no�ci napr�e� Hertza od momentu obci��aj�cego z�bnik dla przek�adni ewolwentowej oraz Nowikowa o tych samych parametrach.
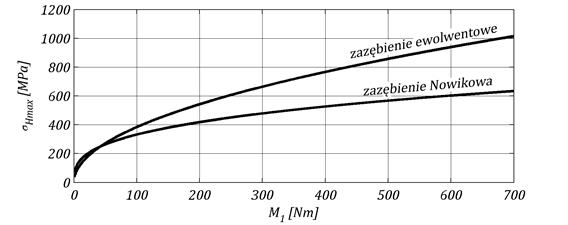
Rys. 4 Por�wnanie napr�e� Hertza przek�adni ewolwentowej oraz Nowikowa
���� Dla ma�ych obci��e� zaz�bienie ewolwentowe wykazuje wi�ksz� no�no�� na naciski ani�eli zaz�bienie Nowikowa. Dla obydwu przek�adni napr�enia s� r�wne dla momentu M1=42 Nm. Powy�ej tej warto�ci teoretyczna no�no�� zaz�bienia Nowikowa w por�wnaniu do ewolwentowego znacz�co ro�nie. Dla momentu M1=480 Nm napr�enia w przek�adni o zarysie Nowikowa s� 1,5 razy mniejsze ni� w przek�adni o zarysie ewolwentowym. Wynika st�d fakt, �e zaz�bienie Nowikowa b�dzie op�aca�o si� stosowa� dla przek�adni silnie obci��onych, gdzie wytrzyma�o�� stykowa odgrywa najwi�ksz� rol�. W rzeczywisto�ci w zale�no�ci od warto�ci b��d�w po�o�enia osi przek�adni Nowikowa napr�enia te, jak zosta�o pokazane w rozdziale 3., mog� wzrosn�� b�d� zmale�.
5. WNIOSKI i PODSUMOWANIE
Artyku� przedstawia zastosowanie teorii Hertza w obliczeniach wytrzyma�o�ciowych k� przek�adni Nowikowa. Wyznaczono w nim wp�yw b��d�w monta�u przek�adni na wielko�� nacisk�w powierzchniowych. Por�wnane r�wnie� zosta�y maksymalne napr�enia Hertza dla przek�adni ewolwentowej oraz Nowikowa.
W przypadku przek�adni silnie obci��onych zaz�bienie Nowikowa odznacza si� teoretycznie wi�ksz� no�no�ci� na naciski ani�eli zaz�bienie ewolwentowe. Ponadto b��d rozstawienia osi k� przek�adni mo�e korzystnie wp�ywa� na rozk�ad napr�e� przez przesuni�cie punktu styku ku stopie z�ba wypuk�ego, gdzie stosunek �rednich promieni krzywizn jest mniejszy. W zale�no�ci od charakteru b��du, przekoszenia osi napr�enia nieznacznie rosn� b�d� malej� wzd�u� szeroko�ci wie�ca, pocz�wszy od wej�cia w zaz�bienie a� do wyj�cia.
6. Podzi�kowania
���� Badania realizowane w ramach Projektu �Nowoczesne technologie materia�owe stosowane w przemy�le lotniczym� Nr POIG.01.01.02-00-015/08-00 w Programie Operacyjnym Innowacyjna Gospodarka (PO IG). Projekt wsp�finansowany przez Uni� Europejsk� ze �rodk�w Europejskiego Funduszu Rozwoju Regionalnego.
References
1. Dyson A., H.P. Evans, W. Snidle.
1989. �Wildhaber-Novikov circular arc gears: some properties of relevance to
their design�. Proceedings of The Royal Society A 425: 341-363.
2. Johnson
K.L. 2003. Contact mechanics. Cambridge:
Cambridge University Press.
3. Markowski
T., M. Batsch. 2013. �Analysis of the Contact Region Geometry of the Novikov
Convexo-Concave Gears�. In AIRTEC 2013.
Frankfurt 5-7.10.2013.
4.
Markowski T., A. Kawalec. 1995. �An Analysis of the
Contact Area Parameters Which Influence the Load Capacity of a Mesh�. In 2nd Int. Scientific Colloquium CAE
Techniques. Bielefeld 1995.
5. Markowski T., M. Mija�, E. Rejman. 2000. Podstawy konstrukcji maszyn. Nap�dy mechaniczne Cz. I. [In Polish: Machine construction basics. Mechanical drives Vol. I]. Rzesz�w: Oficyna Wydawnicza Politechniki Rzeszowskiej.
6. Och�duszko
K. 1985. Ko�a z�bate T.1 Konstrukcja.
[In Polish: Gears T.1 Construction]. Warszawa: WNT.
Received 11.08.2015; accepted in revised form 21.12.2015
![]()
Scientific Journal of Silesian University of
Technology. Series Transport is licensed under a Creative Commons Attribution
4.0 International License