Article citation info:
Chróst, P., Margielewicz, J. Modeling the
vertical dynamics of a car on an mechatronic basis.
Scientific Journal of Silesian University of Technology. Series Transport. 2015, 88, 19-29.
ISSN: 0209-3324. DOI: 10.20858/sjsutst.2015.88.2.
Przemysław CHRÓST[1], Jerzy MARGIELEWICZ[2]
Modeling the VERTICAL dynamics of A
car on an mechatronic BASIS
Summary. This paper presents the results obtained on the basis of the mechatronic model of a passenger car. In order to minimize
the induced mechanical vibrations
during drive event on a coarse road surface, a
modification of the structure of the
vehicle suspension has been applied. The proposed
modification introduces additional active damping
element, which task is to reduce the
vertical displacement of the vehicle
body. In the real world such a target can be achieved by
use of appropriate control units, which drive the electronic and hydraulic
components of the suspension. Additionally, the phenomenological
models of the passengers have been
included into the computer simulation model.
Keywords: modelling, mechatronics, vibroisolation, mechanical vibration.
MODELOWANIE DYNAMIKI
PIONOWEJ SAMOCHODU OSOBOWEGO W UJĘCIU MECHATRONICZNYM
Streszczenie Niniejszy artykuł przedstawia wyniki badań
modelowych uzyskane na podstawie mechatronicznego modelu samochodu
osobowego. W celu minimalizacji drgań mechanicznych wzbudzanych podczas jazdy
po nierównym podłożu zastosowano modyfikację konstrukcji zawieszenia samochodu.
Proponowana modyfikacja polega na wprowadzeniu do zawieszenia dodatkowego
aktywnego elementu, którego zadaniem jest ograniczanie przemieszczenia
pionowego nadwozia. Tak sformułowane zadanie badawcze osiąga się przez
odpowiednie sterowanie aktywnymi elektrycznymi lub hydraulicznymi urządzeniami
wykonawczymi odpowiedzialnymi za współpracę nadwozia z zawieszeniem.
Dodatkowo podczas symulacji komputerowych uwzględniono modele fenomenologiczne
odwzorowujące dynamikę ciała kierowcy i pasażera.
Słowa kluczowe: modelowanie; mechatronika; wibroizolacja; drgania mechaniczne.
1. WPROWADZENIE
W ostatnich latach obserwuje się coraz więcej samochodów osobowych i ciężarowych poruszających się po polskich drogach. Potwierdzają to dane publikowane corocznie w rocznikach statystycznych wydawanych przez Główny Urząd Statystyczny. Przykładowo w 2013 roku przybyło około 645 tys. samochodów osobowych i 64 tys. samochodów ciężarowych w stosunku do 2012 roku [32]. Wzrastająca liczebność poruszających się pojazdów po polskich drogach na szczęście nie przekłada się na zwiększenie liczby wypadków z ich udziałem. W tym miejscu warto wspomnieć, że wypadki drogowe w głównej mierze są spowodowane nieprzestrzeganiem przepisów o ruchu drogowym przez kierujących. Zły stan techniczny pojazdów stanowi znikomą część przyczyn wszystkich zarejestrowanych wypadków drogowych. Pomimo faktu, że nowo projektowane samochody są coraz bardziej bezpieczne i niezawodne, to zwiększone prędkości jazdy oraz pracujący silnik wraz z układem przeniesienia napędu są źródłem drgań mechanicznych, na które narażony jest człowiek [2]. Czas oraz wartość oddziaływań dynamicznych w istotny sposób decydują o komforcie podróży. Hałas oraz drgania mechaniczne są ponadto źródłem zagrożenia i chorób zawodowych, które mogą być przyczyną obniżenia wydajności pracy i sprawności psychofizycznej, a w konsekwencji zagrożeniem w bezpieczeństwie ruchu [16]. Długotrwałe narażenie na oddziaływanie drgań mechanicznych jest przyczyną chorób, do których zalicza się chorobę: wibracyjną, lokomocyjną oraz chorobę „białego palca” [12, 30]. Przeprowadzone badania doświadczalne jednoznacznie wskazują, że przy dużych intensywnościach oddziaływań dynamicznych pojawiają się różnego rodzaju nieprzyjemne odczucia, spowodowane wpływem drgań mechanicznych na organizm ludzki, takie jak bóle: w klatce piersiowej (5÷7 Hz), jamie brzusznej (4,5÷10 Hz), grzbietu (8÷12 Hz), trudności w oddychaniu (4÷8 Hz), utrudniona artykulacja dźwięków (13÷20 Hz). Drgania głowy wzbudzone składowymi harmonicznymi zawierającymi się w przedziale od 6 Hz do 8 Hz są odpowiedzialne za rezonans żuchwy. Częstotliwości rezonansowe organów głowy mieszczą się w zakresie od 20 Hz do 30 Hz, a gałek ocznych 60÷90 Hz [5, 9, 22].
Ocena poziomu drgań oddziałujących na organizm człowieka jest jednym z ważniejszych wskaźników, który świadczy o komforcie podróży [4]. Ich minimalizacja jest możliwa do zrealizowania w dwojaki sposób. Jedną z metod jest modyfikacja konstrukcji; o konieczności takich zmian najczęściej decydują badania testowe na prototypach. Dla większości elementów prace projektowe są wykonywane przez niezależne grupy inżynierów, którzy mają odmienne, a nieraz wręcz wykluczające się cele do zrealizowania. Przykładem takiego konfliktu jest zestrojenie zawieszenia pod kątem właściwości jezdnych, w przypadku którego technicy odpowiedzialni za hałas starają się maksymalnie usztywnić elementy oraz połączyć je miękkimi, podatnymi podzespołami w celu izolacji. Natomiast zespół odpowiedzialny za dynamikę jazdy zakłada możliwie maksymalne usztywnienie zawieszenia w kierunku pionowym oraz poprzecznym do toru jazdy. Dodatkowe założenia dotyczące spełniania wymagań testów zderzeniowych oraz wytrzymałości powodują zamrożenie geometrii konstrukcji zawieszenia we wczesnej fazie projektowania. Drgania na gotowym prototypie można rejestrować dopiero w późnej fazie projektowania, co w konsekwencji zawęża możliwość zmian konstrukcyjnych do zastosowania układów tzw. pasywnej wibroizolacji. Główne zadanie takich układów polega na rozpraszaniu energii oraz okresowym jej magazynowaniu, a następnie oddawaniu. Metody pasywnej wibroizolacji bywają również nazywane metodami tradycyjnymi. Cechują się licznymi zaletami, niemniej jednak przy wzrastających wymaganiach odnośnie do ich skuteczności nie zawsze spełniają swoją funkcję w zakresie niskich częstotliwości [15, 17]. Z tego też względu poszukiwano układów aktywnych, które spełniają stawiane przed nimi wymagania, a których nie są w stanie zrealizować układy pasywne. W odróżnieniu od układów pasywnych układy aktywne [11, 18, 20] konstruuje się w wyniku zastosowania pętli sprzężenia zwrotnego. Prowadzono badania, których celem było poprawienie komfortu jazdy przez aktywną wibroizolację kabin kierowcy [25] czy też samego zawieszenia pojazdu [3, 7, 10]. Warto wspomnieć, że układy aktywnej wibroizolacji mają własne źródło zasilania, które odpowiednio sterowane, może dostarczać lub rozpraszać energię w określony sposób.
Badania modelowe prowadzone na modelach
symulacyjnych uwzględniających aktywną wibroizolację bywają nazywane modelowaniem
mechatronicznym. W ogólnym ujęciu słowo mechatronika powstało z połączenia słów
mechanika i elektronika. Pojawiło się pierwszy raz w japońskiej firmie Yaskawa Electronic
Corporation ok. 1969 roku i w latach 1971 − 1982, jako nazwa handlowa, było
chronione prawnie [8]. Pomimo wielu spotykanych w literaturze definicji
wciąż pojawiają się trudności z jednoznacznym i precyzyjnym określeniem, które
urządzenia można sklasyfikować jako mechatroniczne. Trudności te wynikają
przede wszystkim ze zbyt dużej liczby definicji tej nowej dyscypliny naukowej [6].
W ogólnym ujęciu mechatronika jako nauka ujmuje w jedną całość mechanikę,
elektrotechnikę oraz teorię sterowania. Z tego też względu nazwa modelowanie
mechatroniczne jest w pełni uzasadniona. Pomimo faktu, że mechatronika jest stosunkowo
młodą dyscypliną naukową, dysponuje bardzo obszerną teorią oraz szerokim
wachlarzem środków, które umożliwiają automatyzację procesów technologicznych [31]
oraz transportowych [14, 19, 27].
Przeprowadzanie jakiekolwiek
badań modelowych, których celem jest minimalizacja skutków oddziaływań
dynamicznych zagrażających zdrowiu człowieka, jest mało wiarygodne bez
uwzględnienia modelu dynamicznego odwzorowującego właściwości dynamiczne
organizmu człowieka. Opublikowano już wiele prac poświęconych numerycznym
modelom ciała człowieka. Odpowiedni wybór modelu dynamicznego organizmu
ludzkiego nie należy do zadań prostych. Zazwyczaj osoba modelująca posiłkuje
się danymi zgromadzonymi podczas badań doświadczalnych [12, 16] oraz
informacjami dotyczącymi budowy anatomicznej [23, 24], istniejącymi
dyrektywami, normami, a przede wszystkim sformułowanym celem badań. Dostępne w
literaturze modele cechują się różnym stopniem złożoności, od kilku [26, 28, 33]
do kilkunastu stopni swobody [1, 16]. Modele rozbudowane zwykle stosuje się,
gdy przy jednym źródle wymuszenia zamierza się równocześnie badać zachowanie
różnych narządów wewnętrznych ciała. Niemniej jednak w większości zastosowań
praktycznych zwykle używa się modeli stosunkowo prostych, których niewątpliwą
zaletą jest ich funkcjonalność, w wyniku czego można je łatwo zaadaptować do
założonych celów badań.
2. SFORMUŁOWANIE MODELU OBLICZENIOWEGO
Budowę modelu obliczeniowego
najczęściej poprzedza myślowa idealizacja struktury obiektu badań oraz procesów
i zjawisk w nim zachodzących. Podejmuje się wówczas decyzję o stopniu oraz
zakresie zastosowanych uproszczeń. Podczas komputerowego symulowania procesów
drganiowych wywołanych jazdą po nierównym podłożu nadwozie zamodelowano jako
bryłę sztywną. Przyjęto takie założenie, gdyż odkształcenia elementów nadwozia
są pomijalnie małe w odniesieniu do elementów wykonawczych zawieszenia oraz
siedziska kierowcy i pasażera, a uwzględnienie energii akumulowanej w nadwoziu
wymaga opracowania dokładnego modelu numerycznego uwzględniającego drgania
własne. W takim wypadku konieczna jest znajomość detali geometrii konstrukcji
wraz z umieszczeniem pasywnych elementów tłumiących, co wykracza poza zakres
tego artykułu. Podczas formułowania modelu obliczeniowego podzielono badany
obiekt (rys. 1) na bryły sztywne reprezentujące zespół nadwozia, koła oraz
osoby przemieszczające się pojazdem. W rozpatrywanym modelu pominięto silne
nieliniowości niektórych elementów zawieszenia, prowadzące do usztywnienia
nadwozia już przy niewielkich odkształceniach. Takie efekty są widoczne
szczególnie w przegubach kulowych oraz amortyzatorach [37, 38]. Elementy bezwładnościowe
połączono dwójnikami mechanicznymi odwzorowującymi właściwości sprężyste oraz
tłumiące: zawieszenia, opony oraz ciała człowieka. W sformułowanym modelu
obliczeniowym oddziaływanie dynamiczne jest wywołane nierównością podłoża, po
jakim porusza się samochód.
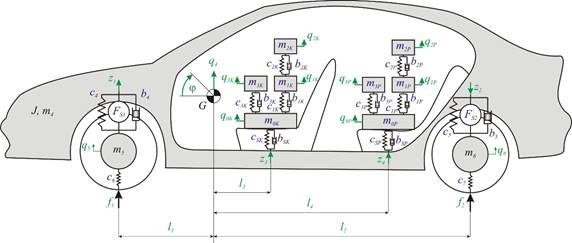
Rys. 1. Model fenomenologiczny
obiektu badań
Mając na względzie czytelność
modelu fenomenologicznego, uwzględniono na nim jedynie niezbędne wielkości
wymagane do wyprowadzenia równań ruchu. Równania ruchu dane są w postaci układu
równań różniczkowych drugiego rzędu o stałych współczynnikach. Z uwagi na
ograniczenia objętościowe niniejszego artykułu same równania nie zostaną
zaprezentowane. Równania te można wyprowadzić zarówno metodami klasycznymi, do
których zaliczają się równania Lagrange’a II rodzaju, jak i metodami
nieklasycznymi, opierającymi się np. na formalizmie grafów. Ruch sformułowanego
układu dynamicznego rozpatrzono ze względu na wymuszenia kinematyczne
pochodzące od nierówności podłoża, przy czym wyidealizowana analityczna funkcja
wymuszeń kinematycznych jest dana zależnością:
|
|
(1) |
gdzie:
v – prędkość przejazdu, A – amplituda nierówności powierzchni, l – długość, na jakiej
przeprowadza się pomiar podłoża, t –
czas przejazdu.
Formalną podstawą modelowania
mechatronicznego jest ujemna pętla sprzężenia zwrotnego, która jest niezbędna
do utrzymania wielkości regulowanej na określonym poziomie. Skorygowanie i
utrzymanie wielkości regulowanej na określonym poziomie jest zadaniem regulatora.
Należy zdawać sobie sprawę, że rodzaj zastosowanego regulatora ma decydujący wpływ
na jakość regulacji. Nie bez znaczenia jest również optymalny dobór parametrów
nastaw regulatorów, jak również liczba pętli sprzężenia zwrotnego. Należy
zdawać sobie sprawę, że układy automatycznej regulacji złożone z pojedynczą
ujemną pętlą sprzężenia zwrotnego nie zawsze dostarczają satysfakcjonujących
wyników, dlatego też czasami wymagane jest zastosowanie dodatkowej pętli
sprzężenia zwrotnego. Jeżeli liczba pętli sprzężenia zwrotnego jest większa od
jedności, wówczas takie układy automatycznej regulacji nazywa się kaskadowymi. Sterowanie
przez oddziaływanie na układ dynamiczny uzyskuje się przez porównanie wielkości
regulowanej z wielkością sterującą. Rezultatem takiego porównania jest błąd
regulacji, którego wartość powinna w teorii być bliska zeru. Na podstawie
sygnału błędu następnie obliczany jest sygnał sterujący, który poprzez
urządzenie wykonawcze oddziałuje na obiekt regulacji. W przypadku sformułowanego
modelu obliczeniowego za wielkość regulowaną przyjęto przemieszczenie pionowe
nadwozia q4, natomiast
wielkością sterującą są siły FS1
i FS2, których kierunki
działania są równoległe do elementów sprężystych i tłumiących zawieszenia.
Schemat blokowy układu aktywnej wibroizolacji nadwozia samochodu przedstawiono
na rysunku 2.
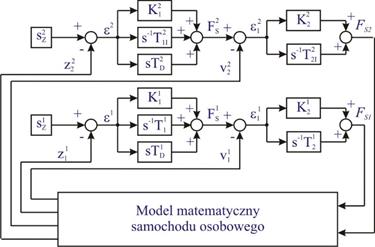
Rys. 2. Schemat blokowy aktywnej
wibroizolacji nadwozia samochodu
Równania różniczkowe ruchu oraz
związki przyczynowo-skutkowe, wynikające ze schematu blokowego aktywnej
wibroizolacji (rys. 2), stanowią formalną podstawę do przeprowadzenia symulacji
komputerowej. Odnośnie do modelu dynamicznego ciała człowieka warto wspomnieć,
że struktura połączeń dwójników mechanicznych uproszczonych modeli człowieka
nie zawsze odpowiada rzeczywistym parametrom segmentów ciała człowieka. Ich
strukturę dobrano w ten sposób, by charakterystyki
amplitudowo-częstotliwościowe modelu w miarę wiarygodnie odwzorowywały
charakterystyki zarejestrowane w badaniach doświadczalnych. Z tego też względu
w prezentowanej pracy ciało kierowcy oraz pasażera zamodelowano układem
rekomendowanym przez normę ISO 5982:2001 (rys. 1). Użytego do symulacji
komputerowych modelu dynamicznego ciała człowieka nie można wykorzystać do
oceny wpływu drgań mechanicznych na poszczególne narządy, gdyż znajduje on
zastosowanie przede wszystkim podczas projektowania układów wibroizolacji [13].
Funkcje wrażliwości względnej, odwzorowujące wpływ elementu bezwładnościowego m3 oraz sztywności siedziska
cS na strefy rezonansowe modelu
ciała człowieka, zobrazowano na rysunku 3.
|
a) |
b) |
|
|
|
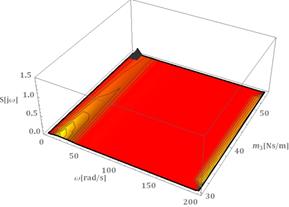
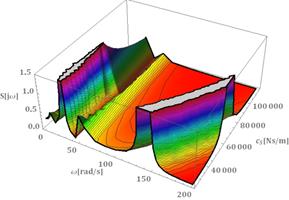
Rys. 3. Funkcje
wrażliwość wyznaczone ze względu na wartość: a) elementu bezwładnościowego m3, b) elementu sprężystego
modelującego sztywność siedziska
Rozkład stref rezonansowych
charakterystyki własnej (rys. 4) wyznaczono przy założeniu, że wymuszenie
zewnętrzne jest przyłożone do elementu bezwładnościowego m3.
|
a) |
b) |
|
|
|
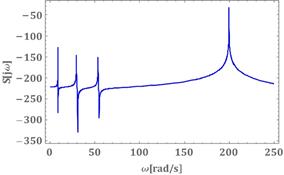
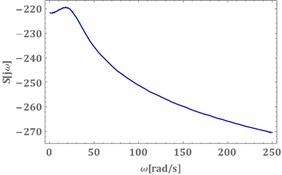
Rys. 4. Rozkład stref
rezonansowych analizowanego modelu dynamicznego ciała człowieka wyznaczono z:
a) pominięciem elementów dyssypacyjnych, b) uwzględnieniem elementów
dyssypacyjnych
Wyznaczone funkcje wrażliwości
należy interpretować jako stosunek względnej zmiany charakterystyki dynamicznej
do względnej zmiany do elementu m3
i cS. Funkcja wrażliwości
względnej jest odwrotnością funkcji wrażliwości bezwzględnej, którą pierwotnie
zdefiniował Hendrik Bode. Przyjęty do badań symulacyjnych model człowieka jest złożony
z czterech elementów bezwładnościowych połączonych dwójnikami mechanicznymi, odwzorowujących
właściwości sprężyste oraz dyssypacyjne ciała człowieka w pozycji siedzącej. Jego
zaletą jest łatwe dostosowanie parametrów modelu wagi pasażera i kierowcy w
zakresie od 55 kg do 90 kg. Osiąga się to, zmieniając jedynie wartość
liczbową elementu bezwładnościowego m3. Przeprowadzając symulacje
komputerowe, należy jedynie pamiętać, że suma elementów bezwładnościowych
modelu dynamicznego człowieka w pozycji siedzącej ma wynosić 73% masy całego
ciała.
3. wyniki badań modelowych
Badania modelowe dotyczące aktywnej
wibroizolacji nadwozia samochodu osobowego zrealizowano w dziedzinie czasu dla pięciu
różnych prędkości przejazdu: 50 km/h, 80 km/h, 110 km/h, 140 km/h oraz 170 km/h.
Symulacje komputerowe przeprowadzono dwukrotnie, tzn. w pierwszych
eksperymentach założono, że kierowca jest lżejszy od pasażera, następnie
przyjęto sytuację odwrotną. Uwzględnienie takich założeń umożliwia określenie
wpływu wagi przemieszczających się samochodem osób na wartości liczbowe
wskaźnika dyskomfortu. Z uzyskanych z symulacji komputerowych przebiegów
czasowych przyspieszenia obliczono wartości skuteczne przyspieszeń drgań w
ruchu ustalonym. Tak oszacowany wskaźnik należy następnie odnieść do wytycznych
zawartych w nomach ISO-2631-1 [34] oraz BS 6841 [35]. Należy mieć na
uwadze, że wskaźniki te stanowią formalną podstawę dyskomfortu, jaki mogą odczuwać
podróżujący samochodem. Należy zdawać sobie sprawę, że wskaźnik reprezentowany
przez wartość skuteczną przyspieszenia drgań nie zawsze dokładnie odwzorowuje wpływ
obciążeń o charakterze udarowym [29]. Dane liczbowe, na podstawie których
przeprowadzono niezbędne symulacje komputerowe, zestawiono w tabeli 1.
Tab. 1
Parametry fizyczne i geometryczne badanego układu
|
Elementy bezwładnościowe |
Elementy sprężyste |
Elementy tłumiące |
Wymiary geometryczne |
|
|
[kg] |
[kg m2] |
[N/m] |
[Ns/m] |
[m] |
|
m0K = 2 |
J = 231 |
cSK = 65 700 |
bSK = 1 210 |
l1 = 1,03 |
|
m1K = 6 |
- |
cSP = 65 700 |
bSP = 1 210 |
l2 = 1,55 |
|
m2K = 2 |
- |
c1K = 9 990 |
b1K = 387 |
l3 = 0,1 |
|
m3K = 30 |
- |
c2K = 3 440 |
b2K = 234 |
l4 = 1 |
|
m0P = 2 |
- |
c3K = 3 620 |
b3K = 1 390 |
- |
|
m1P = 6 |
- |
c1P = 9 990 |
b1P = 387 |
- |
|
m2P = 2 |
- |
c2P = 3 440 |
b2P = 234 |
- |
|
m3K = 55 |
- |
c3P = 3 620 |
b3P = 1 390 |
- |
|
m4 = 1015 |
- |
c4 = 31 710 |
b4 = 1 309 |
- |
|
m5 = 14,7 |
- |
c5 = 21 880 |
b5 = 1 309 |
- |
|
m6 = 14,7 |
- |
c6 = 165 258 |
- |
- |
|
- |
- |
c7 = 165 258 |
- |
- |
Wartości
liczbowe dotyczące sztywności promieniowej opony dobrano na podstawie wyników
badań zamieszczonych w pracy [21]. Wpływ współczynnika tłumienia promieniowego opony
pominięto ze względu na jego zmienność w
zależności od postaci drgań własnych, częstotliwości, temperatury opony oraz
prędkości obrotowej. Uwzględnienie wszystkich tych zależności uniemożliwiłoby
bezpośrednie porównanie wyników symulacji przeprowadzonych dla różnych
prędkości jazdy. Dodatkowo współczynnik tłumienia przy nieznajomości dokładnej
geometrii oraz danych materiałowych opony można wyznaczyć jedynie na podstawie
danych doświadczalnych [36]. Podczas
przeprowadzania obliczeń numerycznych w zakresie aktywnej wibroizolacji
nadwozia samochodu parametry nastaw regulatorów odpowiedzialnych za
minimalizację oddziaływań dynamicznych wywieranych na podróżujące osoby
zestawiono w tabeli 2.
Tab. 2
Parametry nastaw układu aktywnej wibroizolacji
|
Nazwa parametru |
Oznaczenie |
Regulator
PID |
Regulator
PI |
|
Wzmocnienie
sygnału błędu |
K0 |
20 |
20 |
|
Wzmocnienie
członu proporcjonalnego |
Ki |
20 |
20 |
|
Stała
czasowa całkowania |
TiI |
30 |
30 |
|
Stała
czasowa różniczkowania |
TD |
20 |
- |
Na podstawie danych liczbowych zestawionych w
tabelach 1 i 2 przeprowadzono symulacje komputerowe układu aktywnej
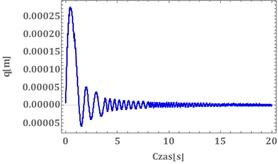
wibroizolacji modelu nadwozia samochodu. Wyniki badań modelowych przedstawiono
w postaci przebiegów czasowych dla wybranych współrzędnych konfiguracyjnych
sformułowanego modelu obliczeniowego. Wykresy przedstawione na rysunkach 5 i 6
obrazują przemieszczenie pionowe siedziska kierowcy i pasażera podczas startu
i rozpędzania samochodu do maksymalnej prędkości 170 km/h. Podczas rozpędzania
samochodu uwzględniono chwile, w których następuje zmiana przełożenia.
Przypominamy, że wyniki te uzyskano przy założeniu, że kierowca jest lżejszy od
pasażera.
|
a) |
b) |
|
|
|
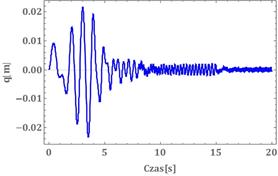
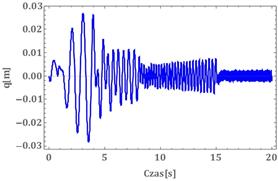
Rys. 5. Przemieszczenie siedziska
nadwozia niewibroizolowanego: a) kierowcy, b) pasażera
|
a) |
b) |
|
|
|
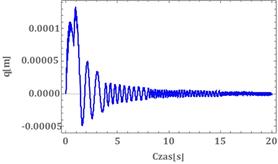
Rys. 6. Przemieszczenie siedziska nadwozia
wibroizolowanego: a) kierowcy, b) pasażera
Analogiczne symulacje komputerowe wykonano w
odniesieniu do sytuacji, gdy kierowca jest cięższy od pasażera. Uzyskane wyniki
badań modelowych układu aktywnej wibroizolacji nadwozia samochodowego nie
wykazały, że ciężar osób zlokalizowanych na siedzisku kierowcy i pasażera
istotnie statystycznie wpływał na odczuwane drgania podczas podróży.
4. PODSUMOWANIE
W pracy
zamieszczono mechatroniczny model aktywnej wibroizolacji nadwozia samochodu
osobowego, który możne znaleźć zastosowanie podczas projektowania lub
modyfikacji zawieszenia pojazdu. Warto zaznaczyć, że przedstawiona koncepcja
aktywnego układu minimalizującego oddziaływania dynamiczne wywierane na
człowieka podczas jazdy jest skutecznym narzędziem badawczym. Uwzględnienie w
symulacjach komputerowych złożonych modeli ciała człowieka umożliwi
prognozowanie wpływu oddziaływań dynamicznych na odczuwane dolegliwości przez
podróżujących. Na podstawie przeprowadzonych eksperymentów numerycznych możliwe
jest sformułowanie wniosków o charakterze ogólnym:
·
Zaproponowane
podejście do aktywnej wibroizolacji pozwala na jakościową oraz ilościową ocenę
wpływu oddziaływań dynamicznych przenoszonych na kierowcę oraz pasażerów.
·
Zastosowany
układ aktywnej minimalizacji spełnił postawione przed nim zadanie. O skutecznym
ograniczaniu oddziaływań dynamicznych w istotny sposób decydują parametry
nastaw układów automatycznej regulacji.
·
Zastosowanie
dodatkowej pętli sprzężenia zwrotnego zdecydowanie poprawia komfort podróży.
·
Niezależnie od
tego, czy nadwozie samochodu jest wibroizolowane, czy nie, największe wartości
przemieszczeń pionowych są rejestrowane w momencie startu i w początkowej fazie
rozpędzania samochodu. Takiego zachowania systemu aktywnej wibroizolacji należy
upatrywać w bezwładności układu automatycznej regulacji.
Sformułowany
w pracy model obliczeniowy stanowi podstawę do rozwijania badań nad dynamiką
pojazdów samochodowych w ujęciu mechatronicznym, w szczególności w zakresie osób
podróżujących.
References
1.
Arslan Y.Z. 2015. “Experimental assessment of
lumped-parameter human body models exposed to whole body vibration”. Journal of
Mechanics in Medicine and Biology 15(1).
DOI: 10.1142/S0219519415500232.
2.
Bogacz R. 1998. „O
zjawiskach dynamicznych wywołanych oddziaływaniem pojazdów szynowych i z
infrastrukturą”. [In Polish: "The dynamic phenomena caused by the impact of rail
vehicles with the infrastructure"]. In
VIII Sympozjum pt. „Wpływ wibracji na
otoczenie”: 15-22. 28-30 września 1998, Kraków-Janowice, Poland.
3.
Buma S. 1991. “Toyota active control suspension system
for the 1989 Celica”. In Proc. Int. Symp.
On “Active Control of Sound and Vibration”: 517-518. 1991, Tokyo.
4.
Coermann R.R., M.D. Ziegenruecker, A.L. Wittwer, B.S. Henning,
E. von Gierke. 1960. “The passive dynamic mechanical properties of the human
thorax-abdomen system and of the whole body system”. Aerospace Medicine 31(6): 443-455.
5.
Dupuis H., E. Hartung, M. Haverkamp. 1991. “Acute
effects of transient vertical whole-body vibration”. Arch. Occup. Environ. Health 63: 261-265.
6.
Gawrysiak M. 1997.
Mechatronika i projektowanie
mechatroniczne. [In Polish: Mechatronics and
mechatronic design]. Białystok:
Wydawnictwo Politechniki Białostockiej.
7.
Gromadowski T., J.
Osiecki, B. Stępiński. 1996. „Dynamika
pionowa samochodu przy aktywnym sterowaniu zawieszeniem”. [In Polish: “The
dynamics of the vertical car with active suspension control”]. Mechanika 48: 245-252. Rzeszów:
Wydawnictwo Politechniki Rzeszowskiej.
8.
Heimann B., W. Gerth, K. Popp. 2001. Mechatronika.
[In Polish: Mechatronics]. Warszawa:
PWN.
9.
Kaliński W., A.
Nowak, J. Wojnarowski. 1996. Wibroizolacja
maszyn roboczych. [In Polish: Vibration
isolation of working machines]. Gliwice: Wydawnictwo Politechniki Śląskiej.
10. Kamiński E. 1987. „Aktywne zawieszenie pojazdów
samochodowych”. [In Polish: „Active suspension of motor vehicles”]. Mechanika 1. Kraków: Wydawnictwo AGH.
11. Kowal J. 1990. „Aktywne i semiaktywne metody wibroizolacji
układów mechanicznych”. [In Polish: “Active and semiactive methods of
isolation and mechanical systems”]. Mechanika
23. Kraków: Wydawnictwo AGH.
12. Książek M. 1999. „Modelowanie i optymalizacja układu
człowiek-wibroizolator-maszyna”. [In Polish: “Modeling and optimization of
human-machine-vibro-isolator”]. Zeszyty Naukowe Politechniki Krakowskiej. Seria Mechanika
244. Kraków: Wydawnictwo Politechniki Krakowskiej.
13.
Maciejewski I. 2013.
„Badanie skuteczności działania układów zawieszenia siedziska stosowanego do
ochrony operatorów maszyn roboczych przed drganiami”. [In Polish: “Testing the
effectiveness of seat suspension systems used to protect machine operators
working against vibrations”]. The
Archives of Automotive Engineering – Archiwum Motoryzacji 61(3): 111-125.
14. Margielewicz Jerzy. 2003. „Mechatroniczny model
suwnicy pomostowej”. [In Polish: „Mechatronic model bridge crane”]. Maszyny Dźwigowo-Transportowe. Kwartalnik
Naukowo-Techniczny 1-2: 23-33.
15. Michałowski S. 1994. „Aktywne układy w konstrukcji
maszyn roboczych”. [In Polish: „Active systems in machine design”]. Zeszyty Naukowe Politechniki Krakowskiej.
Seria Mechanika 171. Kraków: Wydawnictwo Politechniki Krakowskiej.
16.
Nader M. 2001. Modelowanie i symulacja oddziaływania drgań
pojazdów na organizm człowieka. [In Polish: Modeling
and simulation of the impact of vibration on the human body vehicles]. Warszawa:
Oficyna Wydawnicza Politechniki Warszawskiej.
17. Nizioł J. 1984. „Wibroizolacja pasywna i aktywna
układów mechanicznych poddanych działaniu wymuszeń przypadkowych”. [In Polish:
“Vibration isolation of passive and active mechanical systems subjected to
random excitations”]. In XI Sympozjum
„Drgania w układach fizycznych”: 25-47. Poznań-Błażejewko.
18. Nizioł J. 1996. „Wybrane zagadnienia aktywnej
wibroizolacji”. [In Polish: „Selected issues of the active vibration isolation”]. In XVII
Sympozjum „Drgania w układach fizycznych”: 30-39. Poznań-Błażejewko.
19. Osiecki J., B. Stefański. 1992. „Wibroizolacja pojazdu
za pomocą aktywnego układu hydraulicznego szeregowo włączonego w zawieszenie”. [In Polish:
“Vibration isolation of the vehicle by means of an active hydraulic series
included in the suspension”]. In Sympozjum
„Wpływ wibracji na otoczenie”: 133-138. Kraków-Janowice.
20. Palej R. 1997. „Dynamika i stateczność aktywnych
pneumatycznych układów wibroizolacji”. [In Polish: „The dynamics
and stability of active pneumatic vibration isolation systems”]. Zeszyty
Naukowe Politechniki Krakowskiej. Seria Mechanika 218. Kraków: Wydawnictwo Politechniki Krakowskiej.
21.
Parczewski K. 2013.
„Wpływ ciśnienia w ogumieniu na dynamikę ruchu pojazdu podczas manewru
hamowania”. [In Polish: „The influence of tire pressure on the dynamics of movement
of the vehicle during braking maneuver”]. Eksploatacja
i niezawodność 15(2): 134-19.
22.
Sandover J. 1986. “Vibration and people”. Clin. Biomechanics 1: 150-159.
23. Schünke M., E. Schulte, U.
Schumacher, M. Voll, K. Wesker. 2009. Prometeusz,
atlas anatomiczny człowieka. Tom I.
[In Polish: Prometheus atlas of human
anatomy. Tom I]. Redakcja wydania
polskiego Gielecki A.St., Żurada A. Wrocław: MedPharm Polska.
24. Sokołowska-Pituchowa, J. (red.). 2003. Anatomia człowieka. [In Polish: Human anathomy]. Warszawa: Wydawnictwo
Lekarskie PZWL.
25.
Stein J., I. Ballo. 1991. “Active vibration control
system for driver’s seat for off-road vehicle”. Vehicles System Dynamics 20: 57-78.
26.
Stutz L.T., F.A. Rochinha. 2011. “Synthesis of a
magneto-rheological vehicle suspension system built on the variable structure
control approach”. J. of th Braz. Soc. Of
Mech. Sci. & Eng. XXXIII (4):
445-458.
27.
Szpytko J., J.
Schab, J. Smoczek. 2002. „Badania modeli suwnic pomostowych dla potrzeb
eksploatacyjnych”. [In Polish: „Research models of overhead cranes for maintenance”]. Transport Przemysłowy 4(10): 40-44.
28.
Wei L., J. Griffin. 1998. “The prediction of seat
transmissibility from measures of seat impedance”. Journal
of Sound and Vibration 214(1): 121-137.
29.
Więckowski D. 2012.
„Analiza w dziedzinie czasu drgań pionowych ze względu na komfort podróżowania dzieci w samochodzie”. [In
Polish: “The analysis in the time domain vertical vibration due to comfort
children in the car”]. Czasopismo Techniczne
10(109): 73-91.
30.
Wojnarowski Józef.
(red.). 1999. Modele układów maszyna
operator w ograniczaniu oddziaływań drgań wzbudzanych ruchem przerywanym. [In Polish: Model sets the machine operator in
reducing the effects of vibration induced intermittent motion]. Gliwice:
Wydawnictwo Politechniki Śląskiej.
31. Wojnarowski Józef, Jerzy Margielewicz. 2004. „Dynamiki
zespołu roboczego przecinarki taśmowej w ujęciu mechatronicznym”. [In Polish:
“Dynamics of work tape cutting in terms of mechatronic”]. Teoria Maszyn
i Mechanizmów I: 303-310. Kraków:
Wydawnictwo Instytutu Technologii Eksploatacji.
32.
Rocznik statystyczny Rzeczpospolitej Polskiej. 2014. [In Polish: Polish
Statistical Yearbook].
33.
ISO 5982:2001. Mechanical
vibration and shock-range of idealized values to
characterize seated-body biodynamic response under vertical vibration.
34.
ISO-2631-1. Mechanical
vibration and shock. Evaluation of human exposure to whole-body vibration. Part
I: General requirements. 1997.
35.
BS 6841. Guide
to measurement and evaluations of human exposure to whole-body mechanical
vibration and repeated shock. 1987.
36.
Kim B.S., C.H. Chi, T.K. Lee. 2007. “A study on radial
directional natural frequency and damping ratio in a vehicle tire”. Applied Acoustics 68: 538-556.
37.
Heiβing B., M. Ersoy. 2001. Chassis Handbook. Fundamentals, Driving dynamics, Components,
Mechatronics, Perspectives. ATZ.
38.
Komori K., T.
Nagataki. 2015. “Friction Behavior of Diamond-Like Carbon Coated Ball Joint:
Approach to Improving Vehicle Handling and Ride-Comfort”. SAE Technical Paper 2015-01-1507.
Received 20.01.2015;
accepted in revised form 15.05.2015
![]()
Scientific Journal of Silesian University of
Technology. Series Transport is licensed under a Creative Commons Attribution
4.0 International License