Jan WARCZEK, Kamil BRONCEL
APLIKACJA MetodY badań
własności dynamicznych zawieszeń pojazdów samochodowych o DMC
powyżej 3,5 tony W PROGRAMIE LABVIEW
Streszczenie. W artykule przedstawiono wyniki badań symulacyjnych,
których celem była walidacja metody wyznaczania charakterystyki tłumienia
zawieszenia pojazdu samochodowego. Opracowana metoda została wykorzystana do wykonania
programu
w środowisku LabView. W badaniach wykorzystano wyniki symulacji
przeprowadzonych na ćwiartkowym modelu zawieszenia pojazdu użytkowego. Docelowo
przedstawiona metoda oraz jej wersja użytkowa, w postaci programu działającego
na platformie systemu Windows, mają znaleźć zastosowanie w diagnostyce
samochodów o dopuszczalnej masie całkowitej powyżej 3,5 tony.
Słowa kluczowe: Diagnostyka samochodów, charakterystyki tłumienia, zawieszenie pojazdu, LabView
THE
APPLICATION OF DETERMINATION METHOD of DYNAMIC PROPERTIES of Track SUSPENSION
IN LABVIEW
Summary. The article presents the results of
simulation tests, which aim was to validate the method of determining the
damping characteristics of the suspension vehicle. The developed method was
used for the implementation of the program in LabView environment. The study
used the results of simulations carried out on the DOF model of a truck suspension.
Ultimately, the presented method and its version in use as a program running on
the Windows platform is to be applied in the diagnosis of vehicles with a
maximum permissible weight of over 3.5 tonnes.
Keywords: Diagnosis of vehicles, damping characteristics,
suspension vehicle, LabView
1. WPROWADZENIE
W
oddziaływaniach dynamicznych pomiędzy kabiną pojazdu samochodowego
a nawierzchnią drogi bierze udział wiele elementów konstrukcyjnych. Zespół
zawieszenia jest odpowiedzialny za minimalizację skutków poruszania się pojazdu
po nierównościach nawierzchni drogi, przy jednoczesnym zapewnieniu kontaktu kół
jezdnych z nawierzchnią.
Te zadania zawieszenia decydują o bezpieczeństwie jazdy i komforcie podróży. W
czasie eksploatacji następuje stopniowa degradacja elementów składowych
zawieszenia, czego rezultatem jest pogorszenie ich stanu technicznego. Zmiany
stanu technicznego elementów zawieszeń są możliwe do rozpoznania przy
wykorzystaniu metod diagnostycznych. Jednak dokładna ocena stanu zawieszenia
jest trudna do wykonania i ponadto obecnie stosowane metody dotyczą wyłącznie
samochodów o DMC nieprzekraczającej 3,5 tony [1,3]. Wymagają przy tym
rozbudowanych i drogich stanowisk diagnostycznych. Proponowana w niniejszym
artykule procedura oceny stanu technicznego zawieszeń zaimplementowana w
środowisku LabView może stanowić alternatywę dla obecnie stosowanych metod. LabView (Laboratory Virtual Instrumentation
Engineering Workbench) jest środowiskiem programowania graficznego, tzw.
języka G. W tym środowisku wpisywanie linijek kodu zastąpiono dodawaniem
symboli graficznych połączonych przewodami sygnałowymi. Środowisko LabView
zawiera wiele gotowych komponentów składowych kodu, które łatwo pobrać
z odpowiedniego menu i dodać do tworzonego programu [2]. Bardzo dużą zaletą
jest możliwość bezpośredniego wprowadzania danych przez kartę pomiarową i
dalszą ich analizę przez program. Gotowy program w łatwy sposób można
kompilować do postaci pliku wykonywalnego z rozszerzeniem.exe, co pozwala
tworzyć niezależne aplikacje. Dzięki temu można wykonać aplikacje, działające
na każdym urządzeniu wykorzystującym platformę Windows.
2. OPIS METODY BADAŃ
W analizie dynamiki układów mechanicznych często wykorzystuje się uproszczone modele obliczeniowe. W przypadku zawieszeń pojazdów samochodowych dobre odwzorowanie zachowania się obiektu rzeczywistego jest możliwe do osiągnięcia przy wykorzystaniu modelu dwumasowego [4]. Jest to model o dwóch stopniach swobody, reprezentujący dynamikę ćwiartki zawieszenia pojazdu w kierunku pionowym. Model fizyczny zawieszenia powiązanego z kołem jednym pojazdu przedstawia rys. 1.
Przedstawiony model fizyczny opisuje układ równań różniczkowych (1). Z analizy równia ruchu masy resorowanej wynika, że w chwili, gdy ugięcie elementu sprężystego zawieszenia jest równe jego odkształceniu dla równowagi statycznej z2-z1=0, chwilowa wartość siły dynamicznej, działającej na tę masę, jest równoważona chwilową wartością siły tłumienia. Przy uwzględnieniu, że masa resorowana jest stała, zmiany wartości tej siły dynamicznej są powiązane ze zmianami chwilowych wartości przyspieszeń, działających na masę nadwozia.

Model symulacyjny ćwiartki zawieszenia o
dwóch stopniach swobody (DOF) pojazdu samochodowego wykonano i uruchomiono w programie
Matlab/Simulink. W badaniach symulacyjnych stosowano liniowe i nieliniowe
charakterystyki tłumienia zawieszenia. Przykładowe charakterystyki tłumienia,
wykorzystywane w modelach symulacyjnych, przedstawiają rys. 2, 3, 4 i 5.
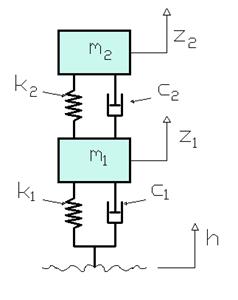
Rys. 1. Model zawieszenia pojazdu
samochodowego, m2 – masa resorowana, m1 – masa
nieresorowana, k2 – współczynnik sprężystości zawieszenia, k1 – współczynnik sprężystości
koła, c2 – współczynnik tłumienia zawieszenia, c1 –
współczynnik tłumienia koła,
h – wymuszenie pochodzące od nierówności drogi, z2 – przemieszczenia
pionowe masy resorowanej, z1 – przemieszczenia pionowe koła (masy
nieresorowanej)
Fig.
1. The quarter model of car
suspension. m2 – sprung mass, m1 – unsprung mass, c1 – stiffness
of wheel, c2 – stiffness of suspension, k2 – damping of
suspension, k1 – damping of
wheel,
h – excitation, z2 – vertical displacement of sprung mass, z1
– vertical displacement of wheel
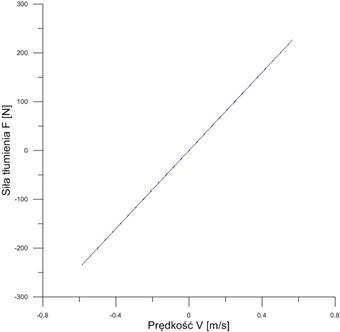
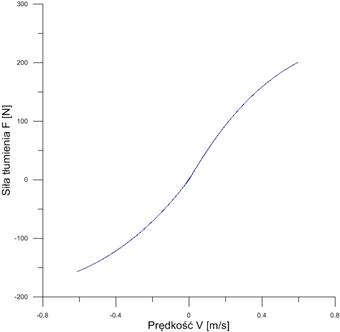
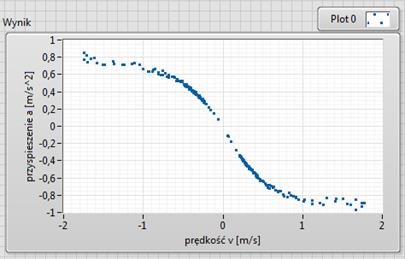
Rys. 2. Charakterystyka
tłumienia nr 15, wykorzystana w badaniach symulacyjnych
Fig. 2. Damping characteristics No. 15 used in the
simulation tests
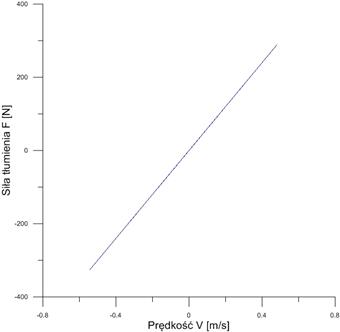
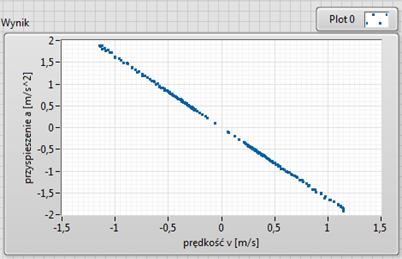
Rys. 3. Charakterystyka tłumienia nr 16, wykorzystana w badaniach symulacyjnych
Fig. 3. Damping characteristics
No. 16 used in the simulation tests
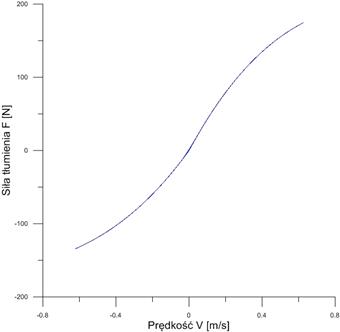
Rys. 4. Charakterystyka tłumienia nr 23, wykorzystana w
badaniach symulacyjnych
Fig. 4. Damping characteristics
No. 23 used in the simulation tests
Rys. 5. Charakterystyka tłumienia nr 24, wykorzystana w badaniach symulacyjnych
Fig. 5. Damping characteristics
No. 24 used in the simulation tests
Wynikami przeprowadzonych badań symulacyjnych były sygnały drganiowe, powiązane z elementami modelu zawieszenia pojazdu. W warunkach eksploatacyjnych sposób pozyskiwania informacji o parametrach dynamicznych zawieszenia badanego pojazdu opiera się na pomiarze wybranych sygnałów drganiowych. Dlatego spośród uzyskanych wyników zostały wybrane dwa parametry drganiowe, które bez większych problemów są możliwe do zarejestrowania na rzeczywistym pojeździe [5]. Konkretnie chodzi o przyspieszenie masy resorowanej i względne przemieszczenie mas resorowanej i nieresorowanej. Przykładowe wyniki badań symulacyjnych, uzyskane z modelu zawieszenia przy wymuszeniach typu Chirp o liniowo narastającej częstotliwości, i badania losowego opowiadającego rzeczywistym nierównościom drogi krajowej drugiej kategorii przedstawiają rys. 6 i 7.
Rys. 6. Przyspieszenia drgań masy resorowanej modelu przy
wymuszeniu typu Chirp
Fig. 6. Vibration acceleration of the sprung mass
model by forcing the type of Chirp
Rys. 7. Przyspieszenia drgań masy resorowanej modelu przy
wymuszeniu typu losowego
Fig. 7. Vibration acceleration of the sprung mass
model by forcing the type random
Uzyskane wyniki badań symulacyjnych zostały zapisane w postaci plików, które były poddawane analizie w następujących krokach:
- sygnał przemieszczeń zostaje poddany różniczkowaniu w celu uzyskania sygnału zmian prędkości w czasie,
- następnie przeprowadza się
detekcję punktów na osi czasu, w których wartość ugięcia dynamicznego elementu
sprężystego zawieszenia równa się jego odkształceniu
w warunkach obciążenia statycznego,
- kolejnym krokiem jest zapis wartości chwilowych przyspieszeń m2 i prędkości względnej podczas przejść przez zero sygnału przemieszczeń,
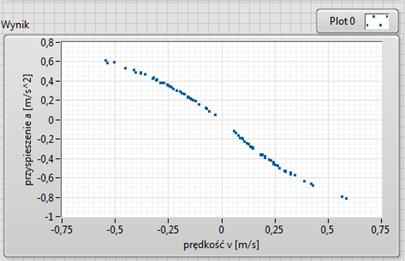
- zobrazowanie otrzymanych wartości na dwuwymiarowym wykresie XY, gdzie osi X odpowiada prędkości względnej mas pojazdu, a oś Y przyspieszeniu masy resorowanej.
Schemat metody uzyskiwania informacji końcowej w postaci wykresu obrazu charakterystyki tłumienia, szczegółowo opisany w pracy [6], przedstawiono w postaci schematu procesowego na rys. 8.
Rys. 8.
Schemat przetwarzania sygnałów drganiowych zarejestrowanych w czasie jazdy
Fig. 8. The
scheme of signal processing of vibrations
Ostatnim etapem analizy jest porównanie uzyskanego wykresu z kształtem charakterystyki tłumienia wykorzystanej jako dane wsadowe w modelu obliczeniowym, co umożliwia ocenę stanu technicznego badanego zawieszenia.
Opisany algorytm został przetłumaczony na język G i na rys. 9 przedstawiono jego widok w postaci diagramu blokowego.
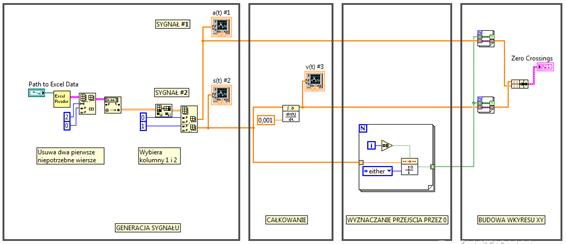
Rys. 9. Widok ogólny programu
w środowisku LabView
Fig. 9. The view of working
diagram in Lab View
Na podstawie
sygnału przemieszczeń względnych mas resorowanej i nieresorowanej
w programie wyznaczana jest postać przebiegu zmian prędkości względnej. Zgodnie
ze schemat procesu przetwarzania wyników obliczeń nieustalonych drgań modelu
dynamicznego zawieszenia, kolejnym krokiem było wyznaczenie macierzy wynikowej.
3. WYNIKI PRZETWARZANIA SYGNAŁÓW W PROGRAMIE LABVIEW
Wynikiem procesu przetwarzania danych wejściowych w programie LabView są zbiory wykresów. Przykładowe wyniki zostały pogrupowane ze względu na rodzaj wymuszenia wykorzystywanego w badaniach symulacyjnych.
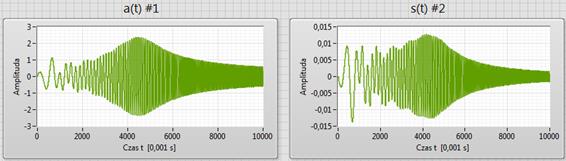
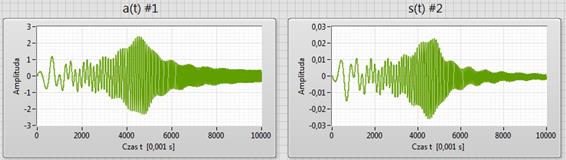
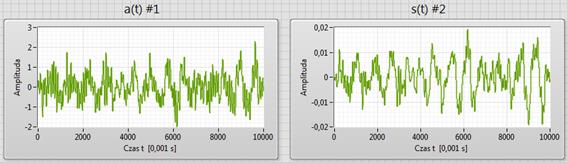
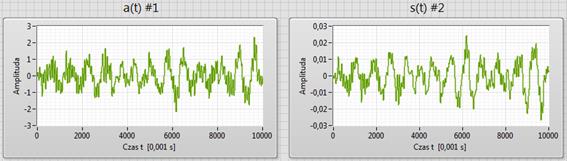
Rys. 10. Przebiegi czasowe przyspieszeń
drgań masy resorowanej i względnych przemieszczeń mas resorowanej i
nieresorowanej zaimportowane z programu Matlab - charakterystyka tłumienia nr
16 - wymuszenie typu Chirp
Fig.
10. The body of car acceleration vibration
(m2) and relative displacement of the suspension imported
from Matlab - damping characteristics No. 16 - forcing the type of Chirp
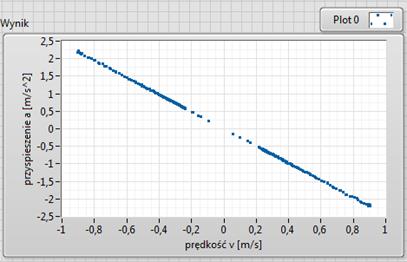
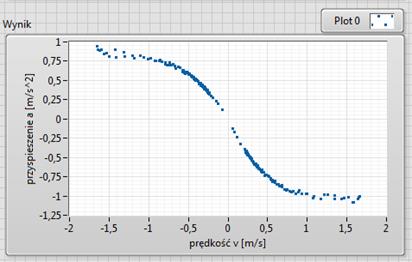
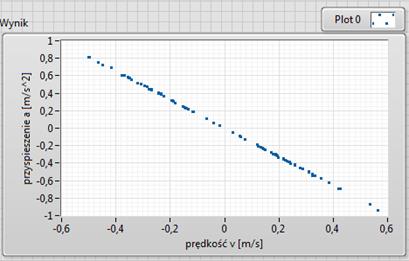
Rys. 11. Uzyskany obraz
kształtu charakterystyki tłumienia nr 16
Fig. 11. The resulting image of
the shape of the damping characteristics No. 16
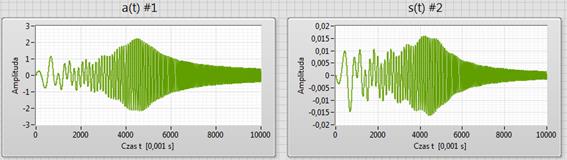
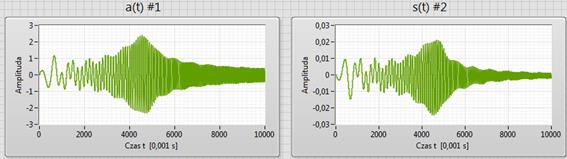
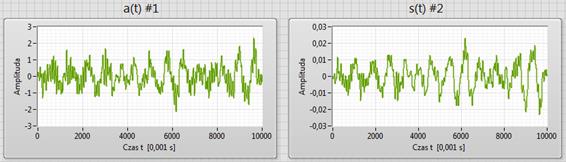
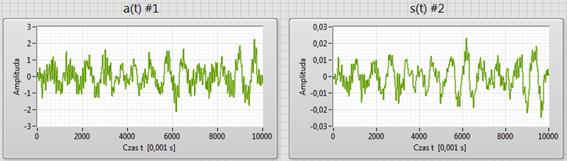
Rys. 12. Przebiegi czasowe
przyspieszeń drgań masy resorowanej i względnych przemieszczeń mas resorowanej i nieresorowanej zaimportowane z
programu Matlab - charakterystyka tłumienia nr 15 - wymuszenie typu Chirp
Fig.
12. The body of car acceleration vibration
(m2) and relative displacement of the suspension
imported from Matlab - damping characteristics No. 15 - forcing the type of
Chirp
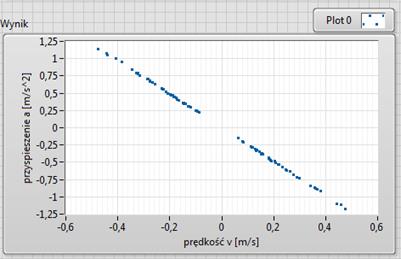
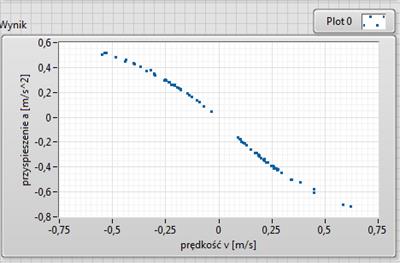
Rys. 13. Uzyskany obraz
kształtu charakterystyki tłumienia nr 15
Fig. 13. The resulting image of
the shape of the damping characteristics No. 15
Rys. 14. Przebiegi czasowe
przyspieszeń drgań masy resorowanej i względnych przemieszczeń mas resorowanej
i nieresorowanej zaimportowane z programu Matlab - charakterystyka nr 23 -
wymuszenie typu Chirp
Fig.
14. The body of car acceleration vibration
(m2) and relative displacement of the suspension imported
from Matlab - damping characteristics No. 23 - forcing the type of Chirp
Rys. 15. Uzyskany obraz
kształtu charakterystyki tłumienia nr 23
Fig. 15. The resulting image of
the shape of the damping characteristics No. 23
Rys. 16. Przebiegi czasowe
przyspieszeń drgań masy resorowanej i względnych przemieszczeń mas resorowanej
i nieresorowanej zaimportowane z programu Matlab - charakterystyka tłumienia nr
24 - wymuszenie typu Chirp
Fig.
16. The body of car acceleration vibration
(m2) and relative displacement of the suspension imported
from Matlab - damping characteristics No. 24 - forcing the type of Chirp
Rys. 17.Wyznacz uzyskany
obraz kształtu charakterystyki tłumienia nr 24
Fig. 17. The resulting image of
the shape of the damping characteristics No. 24
Rys. 18. Przebiegi czasowe
przyspieszeń drgań masy resorowanej i względnych przemieszczeń mas resorowanej
i nieresorowanej zaimportowane z programu Matlab - charakterystyka tłumienia nr
16 - wymuszenie typu losowego
Fig.
18. The body of car acceleration vibration
(m2) and relative displacement of the suspension imported
from Matlab - damping characteristics No. 16 - forcing the type of random
Rys. 19. Uzyskany obraz
kształtu charakterystyki tłumienia nr 16
Fig. 19. The resulting image of
the shape of the damping characteristics No. 16
Rys. 20. Przebiegi czasowe
przyspieszeń drgań masy resorowanej i względnych przemieszczeń mas resorowanej
i nieresorowanej zaimportowane z programu Matlab - charakterystyka tłumienia nr
15 - wymuszenie typu losowego
Fig.
20. The body of car acceleration vibration
(m2) and relative displacement of the suspension imported
from Matlab - damping characteristics No. 15 - forcing the type of random
Rys. 21. Uzyskany obraz
kształtu charakterystyki tłumienia nr 15
Fig. 21. The resulting image of
the shape of the damping characteristics No. 15
Rys. 22. Przebiegi czasowe
przyspieszeń drgań masy resorowanej i względnych przemieszczeń mas resorowanej
i nieresorowanej zaimportowane z programu Matlab - charakterystyka tłumienia nr
23 - wymuszenie typu losowego
Fig.
22. The body of car acceleration vibration
(m2) and relative displacement of the suspension imported
from Matlab - damping characteristics No. 23 - forcing the type of random
Rys. 23. Uzyskany obraz
kształtu charakterystyki tłumienia nr 23
Fig. 23. The resulting image of
the shape of the damping characteristics No. 23
Rys. 24. Przebiegi czasowe przyspieszeń
drgań masy resorowanej i względnych przemieszczeń mas resorowanej i
nieresorowanej zaimportowane z programu Matlab - charakterystyka tłumienia nr
24 - wymuszenie typu losowego
Fig.
24. The body of car acceleration vibration
(m2) and relative displacement of the suspension imported
from Matlab - damping characteristics No. 24 - forcing the type of random
Rys. 25. Uzyskany obraz
kształtu charakterystyki tłumienia nr 24
Fig. 25. The resulting image of
the shape of the damping characteristics No. 24
Uzyskane wyniki potwierdzają przydatność prezentowanej metody do wyznaczania parametrów dynamicznych zawieszeń pojazdów. Wynik w postaci obrazu charakterystyki tłumienia można uzyskać przy dowolnym rodzaju wymuszenia, pod warunkiem zachowania pewnego założonego pasma częstotliwości. Do tego celu nadają się zarówno wymuszenia deterministyczne, jak i stochastyczne. Ponieważ zaprezentowana metoda nie wymaga stosowania dodatkowych wzbudników drgań, więc można ją wykorzystać do wyznaczania parametrów dynamicznych zawieszeń pojazdów o DMC powyżej 3,5 tony lub po określeniu wartości granicznych, jako metodę diagnostyczną np. amortyzatorów. Zaletą opisanej procedury jest możliwość jej przeprowadzenia w warunkach eksploatacyjnych. Może to stanowić o aplikacyjności tej metody w pokładowych systemach diagnostycznych pojazdów.
4. PODSUMOWANIE
Przedstawiona
metoda nie wymaga kosztownych urządzeń, a ocena stanu technicznego może odbywać
się w rzeczywistych warunkach jazdy. Oprogramowanie łatwo dostosować do
działania w środowisku Windows i zastosować na urządzeniu przenośnym typu
tablet. Takie rozwiązanie można również wprowadzić do urządzeń diagnozowanych
przez system EOBD
i możliwe będzie monitorowanie zawieszenia pojazdu. Stały monitoring prowadzony
w czasie normalnej eksploatacji pozwala na bieżąco porównywać uzyskane wykresy
przyspieszeń drgań w funkcji prędkości względnej z danymi wzorcowymi lub bazą
danych, opracowaną w czasie historii użytkowania. Kiedy uzyskiwane wyniki
zaczną przekraczać wyznaczony zakres graniczny, pokładowy system diagnostyczny
będzie przekazywał kierowcy informację o pogorszeniu się stanu technicznego
zawieszenia. Jest to szczególnie istotne w pojazdach ciężkich, gdzie dostępne
metody diagnostyczne często nie są wystarczające, a diagnostyka podczas ruchu w
warunkach rzeczywistych obecnie nie jest stosowana.
Bibliografia
1.
Sikorski J. 1982. Amortyzatory pojazdów samochodowych. [In Polish: Shock absorbers for
motor vehicles]. Warszawa: Wydawnictwo Komunikacji i Łączności.
2.
Chruściel M. 2008.
LabVIEW w praktyce. [In Polish: LabVIEW
in practice]. Wydawnictwo BTC.
3.
Dixon C.J. 2007. The Schock Absorber
Handbook. John Wiley & Sons, Ltd.
4.
Gardulski J., J. Warczek. 2006.
“Badania symulacyjne układu mechanicznego z aktywnym
tłumieniem drgań”. [In Polish: “Simulation tests
of a mechanical system with active vibration damping”]. Problemy Transportu 1 (1): 145-150.
5.
Gardulski J., J. Warczek. 2009. “Identification of damping characteristic example
suspension of car the hydropneumatic construction”. Diagnostyka 3: 41-44.
6.
Warczek J., R. Burdzik, G. Peruń. 2012. “The method for identification of damping
coefficient of the trucks suspension”. In Smart
diagnostics V. Selected, peer reviewed papers from the 5th International
Congress of Technical Diagnostics. September 3-5, 2012, Krakow