Article
citation information:
Trivedi, J., Devi, M.S., Dhara, D. Canny edge detection based real-time intelligent
parking management system. Scientific
Journal of Silesian University of Technology. Series Transport. 2020, 106, 197-208. ISSN: 0209-3324. DOI: https://doi.org/10.20858/sjsutst.2020.106.17.
Janak TRIVEDI[1], Mandalapu Sarada
DEVI[2], Dave DHARA[3]
CANNY
EDGE DETECTION BASED REAL-TIME INTELLIGENT PARKING MANAGEMENT SYSTEM
Summary. Real-time traffic monitoring and parking are very
important aspects for a better social and economic system. Python-based
Intelligent Parking Management System (IPMS) module
using a USB camera and a canny edge detection method was developed. The current
situation of real-time parking slot was simultaneously checked, both online and
via a mobile application, with a message of Parking “Available” or
“Not available” for 10 parking slots. In addition, at the time
entering in parking module, gate open and at the time of exit parking module,
the gate closes automatically using servomotor and sensors. Results are
displayed in figures with the proposed method flow chart.
Keywords: Raspberry Pi, parking,
edge detection, Python, real-time, sensors
1. INTRODUCTION
Parking problems in day to day life
is the current scenario in most cities. The lack of real-time information for
slots/parking positions in a particular location motivated this work on
real-time parking management module using Raspberry Pi for live video. The
primary goal of this framework is to develop a small module using open source
software, hence, python was used for this establishment. Current research
demands hardware-based simulation results and the Internet of Things (IoT). Therefore, we have developed a real-time parking
facility, accessible to the client on a portable mobile application.
Live-stream is captured using a USB
camera. Real-time status of parking is displayed on the LCD screen, which was
present in the parking module and slots availability can be found via the
mobile application. The camera is mounted at a corner to take snapshots of the
object and send pictures to the processing or controller unit, in this case, it
is a raspberry pi. The android module is connected to the raspberry pi through
the Wi-Fi. When user enters in parking area, he/she sees the number of
available parking slots and for further information, he/she simply sends
message “Slots” from the mobile android application to the
“Parking System” and in response, user gets the information about
the parking slots and real-time image of the parking area.
In this article, the literature
survey about hardware module-based parking system or research scenario in IoT is explained in section 2. The Canny edge detection
method is explained in section 3. In section 4 is explained the proposed method
with a flowchart using hardware description and also show results. The final
section deals with discussion and conclusion with future scope from this work.
2. LITERATURE SURVEY
The Internet of Things (IoT) is an added essence in the combination of hardware and
software computing. Intelligent Transportation System (ITS) is one of the main
aspects of smart city development as parking is a part of ITS. Firstly, in the
computer vision field, we have to detect edges from the image to perform a
further task. John Francis Canny in 1986 demonstrated canny edge detection with
numerical mathematical formation. A case study for vehicle parking for outdoor
and indoor conditions using GNSS and ultra-wideband
technology with the help of a state-of-the-art method is explained in [4].
Attempts were made at overcoming the limitations of static and dynamic obstacle
in this article using IoT based real-time traffic
management module in our proposed method with the help of Canny
edge detection and adaptive thresholding.
IoT based design and
implementation prototype of a smart city for Smart Street Cosenza (SSC) (Italy) was presented in earlier [7] using iSapeins edge-based platform. In this article, a future
scope traffic control system is planned to be designed, and part of the traffic
control system, real-time traffic management is implemented here with results.
GPS-based highway toll
collection system, using a combination of hardware (Raspberry Pi,
microcontroller, GPS and LCD module, Wi-Fi adapter, speaker, wi-fi router) and software (SQL database, cloud server) for
reducing traffic congestions is explained in [16]. The automatic time-delay
adjustment system is also included for improving accuracy in the final result.
Smart Park system for
real-time parking availability using mobile sensor and wi-fi,
with the help of random forest-based approach was explained earlier [11].
Improved quality of service as a part of an Intelligent Transportation System
(ITS) with the help of providing real-time public bus travel information system
via a mobile app is explained in [1]. Vehicle detection using colour features,
vehicle tracking using Kalman filter and vehicle
counting with the help of Raspberry Pi 3, open CV and C++ is explained in [3].
Survey of machine learning-based different IoT
application in traffic engineering, security with challenges and open issues is
explained in [5,9]. Face and fatigue detection using Haar descriptors with the help of Raspberry Pi board, USB
camera, Open CV libraries, and Python is explained in [10]. Hybrid smart
parking module, with a survey of the use of different sensors under smart city
development using IoT, is explained in [2].
3. CANNY EDGE DETECTION
Canny edge
detection is a customised algorithm to find edges and was described by John
Francis Canny in 1986 [6]. Localisation and specification of detection-based,
mathematical approach for finding step edges with the help of adaptive
thresholding method. First, in image processing, the Gaussian Kernel with
different size is applied. Gaussian Kernel is defined in 1-D, 2-D or N-D as
mentioned in equation 1 - 3 below [8]
|
|
(1) |
|
|
(2) |
|
|
(3) |
σ
is a standard deviation and σ2 is a variance in
the statistics.
3.1 Filtering operation
Filtering
in Camera, WhatsApp, Instagram, and different apps is a combination of many
low-level processing of various types like contrast changes, colour changes, blurs,
etc. In day to day life Gaussian filters, edge detection takes some images as
input, process it and give us the desired output. Kernel convolution is used
for edge detection and/or filtering operation.
3.1.1 Kernel convolution
A
simple convolution is defined as mentioned in the equation below,
y(x,y) = h(x,y)*g(g,y) (4)
Kernel
convolution is a simple process with taking a small grid of numbers and pass
them over whole images and transforming based on what numbers they are. With
the use of different numbers in the kernel, we are able to perform the various
operation, like blur, edge detection, sharpen, unsharpened, etc.
|
5 |
5 |
5 |
10 |
10 |
|
5 |
5 |
5 |
10 |
10 |
|
5 |
5 |
5 |
10 |
10 |
|
5 |
5 |
5 |
10 |
10 |
|
5 |
5 |
5 |
10 |
10 |
|
1 |
1 |
1 |
|
1 |
1 |
1 |
|
1 |
1 |
1 |
Fig. 1.
Pixel information of the image Fig.
2. A mean kernel
Generally,
a kernel is quite small, even smaller than the image. In this process, we moved
the kernel along with the image so that the pixel is in the centre. Looking at
the kernel 3 X 3, with all values are 1, work as simple mean filtering
operation. Multiplying kernel (Fig. 2) with the kernel (Fig. 1) gets Fig. 3.
|
5 |
5 |
10 |
|
5 |
5 |
10 |
|
5 |
5 |
10 |
Fig. 3.
This is 3 X 3 matrix, selected from image (Fig. 1), for kernel convolution
After
multiplying, normalising by dividing the total value of the kernel. Here, the
total value of kernel is 1+1+1+1+1+1+1+1+1=9. Therefore, it is like averaging
operation. Answer after kernel convolution is = Addition of all elements /
Normalised value. Therefore 5 is now replaced by, (60/9 = 6.67). Continued this
way to get the final output image. Sometimes blurs are used to remove noise
from images before processing it. We can achieve different effects by using
different values of the kernel. Blurring around the edges is ever so slightly
less than the blurring around the image. In the last edge pixel in a megapixel
image probably will not make any difference. We have used the Gaussian kernel
in this illustration. Gaussian blur is commonly used in image processing
because it is the more controlled and edge-preserving kernel. A normal
distribution is a bell curve, and the standard deviation is essentially the
average distance from the mean of all the points. Large standard deviation
(σ) will have a large curve, and it should be symmetrical. Small standard
deviation (σ) have a tight bell curve. Example of small Gaussian blur,
with 3 X 3 Kernel is shown in Fig. 4.
|
1 |
2 |
1 |
|
2 |
4 |
2 |
|
1 |
2 |
1 |
Fig. 4.
Example of Gaussian Kernel with 3 X 3 matrix
Difference
between Figs. 3 and 4 kernels, with priority given to the middle values in both
kernels. The further away get from the pixel of interest, the less interest in
the combined average. The fact that it is not blurring too much makes for an
interesting point. For an edge sharp change in intensity values are less
variable compared to mean blur. In the image processing method, we have to
increase the size of the kernel as the standard deviation (σ) or radius of
the Gaussian function increase. After applying the Gaussian kernel to the same
in Fig. 2, 5 is replace with, (5+10+10+10+20+20+5+10+10)/16 = 6.25, whereas in
earlier case that value was 6.67. So, 6.25 is a nearer value compare to 6.67,
predicts better result with changes in edges using the Gaussian kernel.
3.2 Edge Detection
Edge
detection is simply a case of trying to find the regions in an image, where we
have sharp changes in intensity or a sharp change in colour. A high value
indicates sharp changes and low values indicate a shallow change. A very common
operator is the Sobel operator, which was derived by Irwin Sobel
and Gary Feldman in 1968 [6], which is an approximation to a derivation of an
image with separate in x and y direction, as shown in Fig. 5.
 and
and 
Fig. 5.
Gradient in xand y directions
If,
we are operated kernel convolution (Fig. 1) with Gx
from Fig. 5, -5+0+10-10+0+20-5+0+10 = 20, and now if all values are same in
Fig. 2, then the answer is 0, with one side dark or bright. Kernel convolution
(Fig. 2) with Gy from Fig. 5,
-5-10-10+0+0+0+5+10+10=0. So, gradient value and orientation of edge is given
by equations 5 and 6,
![]() (5)
(5)
Angle=  (6)
(6)
As of
equation magnitude is always positive and value of zero will be a consistent
colour. If the gradient in the x-direction is big and gradient in the
y-direction is small, then a moderate gradient should be obtained. Also, if the
gradient in both directions is big, then a large gradient value should be
obtained. This gradient value represents, how big the edge is in a particular
location. We can also calculate the angle of the edge using equation 6. These
equations help find structures or objects. First, we need to convert our colour
image to greyscale image, taking only change of intensity and then use Gaussian
filter.
The canny
edge detector essentially takes a Sobel operator and makes it step better. The
input of the canny operator is the output of the Sobel operator. Thinning all
the images, so they are 1 pixel wide. Canny edge operator is first finding the
edges then using a process called hysteresis thresholding, which is two-level
thresholds. Every pixel first finds local maxima, that is, bigger than its
neighbours after calculation of gradient and orientation. This process should
be completed over the entire image. The second stage to remove the edges that
even though not maximum, or weaker response. Create an image with dominant
edges and preserves only dominate edges, and this process is done by hysteresis
thresholding. Two-level thresholds, upper-level T1
and lower- level T2 decides whether objects edge in, edges out or in if connected. Adjust upper
and lower level threshold of hysteresis thresholding, for controlling the
output of canny edge detection.
4. PROPOSED METHOD
First, select Region of Interest (ROI)
that include only white background. Apply Gaussian filter with sigma (σ)
value of 0.3. Then apply a canny edge detector with defined lower and upper
limit value to a set statistical parameter. Detect edges in (x, y) location,
and then create a counter for object availability in the parking area, which is
already shown in the main flowchart in the Figs. 6, 7 and 8 represented as the
separate process for finding the outcome.
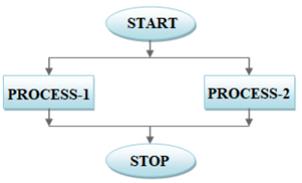
Fig. 6. Main flowchart.
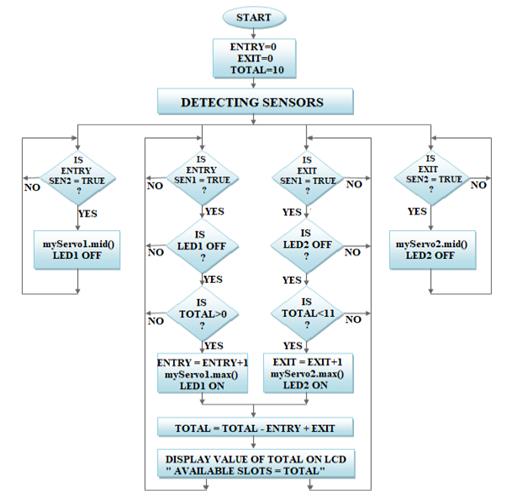
Fig. 7. Process-1
4.1 Process-1
Process-1
is related to the entry and exit module. This process is a continuous process,
and sensors continuously detect the presence or absence of an object. During
start of the procedure entry, exit and a total number of slots values are 0,0 and 10, respectively. Now, if sensor-1 entry is True, that is, a car is detected, it will check the status
of the LED. If the LED is off that means it is false, thereafter, it will check
the total predefined number whether it is greater than zero or not. If it is
zero then there is no available slot in the parking area. When a condition is
true then the value of the entry is increased by one, the gate opens and the
LED comes on. Simultaneously, the number of available slots is updated in a
display. When the sensor-2 entry is true, the gate closes and the LED turns
off. Similar kind of process is done at exit mode. The main difference between
entry and exit mode is that when an exit is detected, a decrease in the count
of numbers of available slots and accordingly update the display.
4.2 Process-2
Process-2
is about detecting a real-time image. When a Raspberry Pi gets the command
“Slots” from the Android module, it initially captures the
real-time image of the parking area.
Fig. 8. Process-2
4.3 Pseudocode
Start
Video Read
Image conversion (RGB to Grey)
Canny-edge-detection
for object detection
Statistics calculation
to parameter
Apply filtering
operation
Hysteresis thresholding
End
Parking
slots “Available” or “Not available” can also be
detected via an android mobile with internet facility. That means if I am
currently situated at location A, and I have to go to location B, with known
parking small module, for example, 10 number of parking slot, I can easily
check using a network connectivity based android module device. Here, Raspberry
Pi has 40 pins for input/output and every I/O pin gives 3.3V
output. It has also two separate pins of 5V [14].
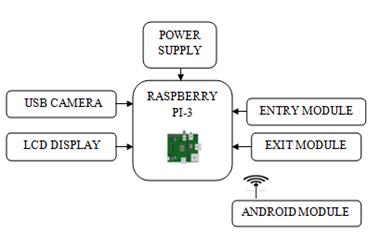
Fig 9. System Architecture
5. RESULT
Apply
proposed method to parking module with 10 toy vehicles, USB camera, raspberry
pi, and an android module for observing/monitoring real-time parking slots
availability by the client and the LCD device for displaying same results at
the monitoring side. Two servo motors used for opening and closing parking
door, 4 -IR obstacle detection sensors used for detection of a real-time
object.
Figure 10
is shown with small parking module as a part of the Intelligent Parking
Management System (IPMS), with entry and exit slots
and hardware connection. Figure 11 is checked parking status with a real-time
image from the parking module represented in Figure 10 with the help of the
android module. Here, different colour cars are used for monitoring the parking
management system. Parking slots are reserves with black spot, for a fixed
position of parking. If a rectangular black spot is visible, then parking slots
are available otherwise parking slots are not available. Figures 11 and 12 are
shown in a combined result: with the LCD screen display at parking module
and in an android mobile application with real-time image, for full parking and
seven available slots, respectively.
In Figure 12, white, yellow, green, red colour car
with different sizes and shapes, placed in parking modules and after applying
the proposed method, it accurately displays result as message “Parking
Full” on the LCD screen, for the server and for the client, who are
present at that particular location. Moreso, at the
same time, for clients who are not present at a particular location of a
parking site. After some time, he/she will reach the specified location of
parking and establish their parking position via an android module in
real-time.

Fig. 10. Small parking module for 10
vehicles parking position

Fig. 11. Checking parking status in
android mobile with a real-time image from
the parking module
6. DISCUSSION
In this article, we have presented a real-time parking
management system module for 10 toy car using the Raspberry Pi hardware.
Different sizes, shapes, and colours were not affected by the proposed method.
Real-time parking position monitors using the LCD screen and any android mobile
device using message application at the same time. Raspberry Pi module and the
android device were connected using wi-fi connection.
Entry module and exit module consists of two sensors, one servo motor and Light
Emitting Diode (LED) each. A sensor first detects the car, gives the input to
the motor and the gate opens, and the LED blinks the signals of car detection.
Afterwards, the second sensor detects the car, gives input to the motor and
gate closes with the LED going off. The exit gate observes a similar procedure
as well. This proposed method not only solves the traffic congestion problem
but it is also helpful for reducing noise, which negatively affects human life.
The environment and the economy benefit because less fuel and time is required
for parking.

Fig. 12. Combined result: with LCD
screen display-parking module and in an android mobile application with a
real-time image for the Full Parking
6. CONCLUSION
In this article, we represented an intelligent parking
monitoring system module using the canny edge detection method, hysteresis
thresholding for 10 parking slots. Real-time parking information available in
an android module with slots availability as well on the LCD screen, available
at the parking location. Here, proposed method results are not at variance with
the different size and shape of four-wheeler vehicles. Advantages of
implementing this method in real-time is to reduce traffic congestions,
parking-related problems via intelligent parking management systems. Real-time
parking results are varied accordingly by the camera position, hence, a fixed
camera position with almost 90° inclinations are positioned for only 10
cars. Real-time parking booking management, parking price policy, in an unknown
place, finding parking position well in advance are the different applications
possible using this proposed method.
In the future, we hope to develop a standalone device
for a real-time intelligent parking management system for smart city
development.
References
1.
Akande
N.O., et al. 2018. “Improving the quality of
service in public road transportation using real time travel information
system”. World Review of Intermodal
Transportation Research 7(1): 57-79. DOI:
10.1504/WRITR.2018.089529.
2.
Al-Turjman F., A. Malekloo. 2019.
“Smart parking in IoT-enabled cities: A
survey”. Sustainable Cities and
Society 49. DOI: 10.1016/j.scs.2019.101608.
3.
Anandhalli M., V.P. Baligar. 2018.
“A novel approach in real-time vehicle detection and tracking using
Raspberry Pi”. Alexandria
Engineering Journal 57(3): 1597-1607. DOI:
10.1016/j.aej.2017.06.008.
4.
Antoniou,
C., et al. 2018. “A framework for risk reduction for indoor parking
facilities under constraints using positioning technologies”. International Journal of Disaster Risk
Reduction 31: 1166-1176. DOI: 10.1016/j.ijdrr.2017.09.032.
5.
Asghari P., A.M. Rahmani, H.H.S. Javadi. 2019. “Internet of Things applications: A systematic
review”. Computer Networks 148:
241-261. DOI: 10.1016/j.comnet.2018.12.008.
6.
Canny
J. 1986. “A Computational Approach to Edge Detection”. IEEE Transactions on Pattern Analysis and
Machine Intelligence 8(6): 679-698. DOI: 10.1109/TPAMI.1986.4767851.
7.
Cicirelli F., et al. 2017. “An edge-based platform for
dynamic Smart City applications”. Future
Generation Computer Systems 76: 106-118. DOI:
10.1016/j.future.2017.05.034.
8.
Course-Hero:
3. The Gaussian Kernel. Available at:
https://www.coursehero.com/file/12384739/diffusiongaussiankernel/.
9.
Cui
L., et al. 2018. “A survey on application of machine learning for
Internet of Things”. International
Journal of Machine Learning and Cybernetics 9(8): 1399-1417. DOI: 10.1007/s13042-018-0834-5.
10. Isaza C., et al. 2019. “Dynamic set point model for
driver alert state using digital image processing”. Multimedia Tools and Applications. Multimedia Tools and Applications
78(14): 19543-19563. DOI: 10.1007/s11042-019-7218-z.
11. Krieg J.G., et
al. 2018. “Unlocking the smartphone’s sensors for smart city
parking”. Pervasive and Mobile
Computing 43: 78-95. DOI: 10.1016/j.pmcj.2017.12.002.
12. Muñuzuri Jesús,
André Alho, João
de Abreu e Silva. 2019. “Evaluating freight loadind/unloading
parking zones characteristics, usage and performance in Southern Europe”.
European Transport \ Trasporti
Europei 73(5). ISSN: 1825-3997.
13. Patkar Manish, Ashish Dhamaniya.
2019. “Effect of on-street parking on effective carriageway width and
capacity of urban arterial roads in India”. European Transport \ Trasporti Europei 73(1). ISSN: 1825-3997.
14. Raspberry Pi: Raspberry Pi 3 Model B.
Available at: https://www.raspberrypi.org/products/raspberry-pi-3-model-b/.
15. Sobel Irwin, Gary Feldman. 1986. “A
3×3 isotropic gradient operator for image processing”. Stanford
Artificial Intelligence Laboratory (SAIL).
16. Tan J.Y., et al.
2017. “GPS-based highway toll collection system: Novel design and
operation”. Cogent Engineering
4(1): p 1-10. DOI: 10.1080/23311916.2017.1326199.
Received 10.11.2019; accepted in revised form 20.01.2020
![]()
Scientific
Journal of Silesian University of Technology. Series Transport is licensed
under a Creative Commons Attribution 4.0 International License