Article citation information:
Maciuk, K. Advantages of combined GNSS processing involving a limited number of visible satellites. Scientific Journal of Silesian University of Technology. Series Transport. 2018, 98, 89-99. ISSN: 0209-3324. DOI: https://doi.org/10.20858/sjsutst.2018.98.9.
Kamil MACIUK[1]
ADVANTAGES OF COMBINED
GNSS PROCESSING INVOLVING A LIMITED NUMBER OF VISIBLE SATELLITES
Summary. Millimetre-precise GNSS measurements may only be achieved by static relative (differential) positioning using a double-frequency receiver. This accuracy level is needed to address certain surveying and civil engineering issues. Relative measurements are performed using a single- or multi-network reference station, whose accuracy depends on a number of factors, such as the distance to the reference station, the session duration, the number of visible satellites, or ephemeris and clock errors. In this work, the author analyses the accuracy of static GNSS measurements according to the number of visible satellites, based on different minimal elevation cut-off angles. Each session was divided into three modes: GPS, GLONASS and hybrid GNSS (GPS+GLONASS). The final results were compared with the corresponding daily EPN solution at the observational epoch in order to determine their accuracy.
Keywords: geodesy, GPS, GLONASS, GNSS, EPN
1.
INTRODUCTION
Currently, there are two fully operable types of GNSS: GPS and GLONASS.
�Fully operable� means that system achieves a nominal number of active
satellites. This is in addition to Galileo and BeiDou. Therefore, we currently
have more than 80 active satellites transmitting signals on multiple
frequencies (Guo, Li, Zhang & Wang, 2017; S�derholm, Bhuiyan, Thombre,
Ruotsalainen & Kuusniemi, 2016). Multi-GNSS processing offers numerous advantages. First of all, a
combined system increases the number of visible satellites. Redundant observations
in theory can increase the accuracy and quality of results due to the
possibility of deleting less accurate signals. In the case of a single GNSS
system, measurements that are simultaneously tracked can, in the best-possible
case, involved 12-13 satellites. Secondly, two or three different satellite
systems could enable a comparison of independent results (Kleusberg, 1990).
Another potential benefit of hybrid measurements is accessibility to areas that
are so far unavailable to single GNSS systems, such as urban and mountainous
areas, where, due to large sky obstructions, a receiver�s position using a
single GNSS system may not be determined or is determined with insufficient
accuracy (Angrisano, Gaglione & Gioia, 2013). On the other hand, multi-GNSS positioning involves disadvantages,
mainly in relation to multi-frequencies and different reference frames and
timescales (Hofmann-Wellenhof, Lichtenegger & Wasle, 2008). In GNSS measurements, there are two types of postprocessing
techniques: relative (differential) and absolute positioning. In recent years,
progress has been made in researching the precise point positioning (PPP)
technique. PPP is based on precise products, e.g., orbits and satellite clock
offsets, and offer centimetre accuracy without the usage of a reference station
(Cai & Gao, 2012).
Millimetre accuracy is required for certain activities in surveying and civil
engineering; however, this accuracy level only provides relative static
positioning and requires a dual-frequency receiver and at least a few hours
observation sessions (Yongjun, 2002).
Differential positioning accuracy depends on a number of factors, such as the
duration of the observation session, the distance to the reference station(s)
and atmospheric effects (Charles, 2010; Xu, 2003).
Some errors can be significantly reduced by applying a relevant cut-off angle (Schmid, Rothacher, Thaller & Steigenberger, 2005). But, the utilization of a minimal satellite elevation can dramatically
reduce the number of observations; due to GNSS geometry, it is mainly visible
on medium latitudes. The significant development of GNSS in recent years is
connected with the evolution of new processing algorithms and new receiver
types. While research into the problem analysed in this work has been carried
out by Alcay, Inal, Yigit and Yetkin (2012), in their study, GLONASS did not achieve full constellation capacity.
In researching the current paper, the author studied 90 consecutive daily
measurements in GPS-only, GLONASS-only and GNSS mode. The research objects were
two baselines (Figure 1): ZYWI-KRA1 (67 km) and ZYWI-WROC (220 km).
Additionally,
observations were processed for four different elevation cut‑off angles.
This approach was taken into consideration in order to determine the accuracy
of multi-GNSS processing, especially in simulated large obstruction areas.
This work presents
a set of GPS, GLONASS and hybrid GNSS solutions for 90 consecutive daily
observations, according to the elevation cut-off angle. Results were compared
with final daily EPN solutions. The goal of this work was to compare single and
multiple GNSS solutions under simulated sky visibility conditions.
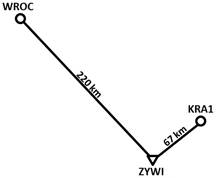
Fig. 1. Analysed baselines
2. GNSS POSITIONING
The carrier phase observations are
used for technical and scientific purposes, when decimetre-or-below accuracy is
demanded. To eliminate some systematic errors, phase difference observations
are used. For satellite s and
receiver r, a carrier phase linear
observation on frequency L is defined
as (Garcia, Mercader & Muravchik, 2005; Kaplan & Hegarty, 1997):
![]() ����������������������� (1)
����������������������� (1)
where: ![]() �is the measured
pseudorange between receiver r and
satellite s,
�is the measured
pseudorange between receiver r and
satellite s, ![]() �is the wavelength for
the frequency in use,
�is the wavelength for
the frequency in use, ![]() �is the integer carrier
phase ambiguity,
�is the integer carrier
phase ambiguity, ![]() �is the propagation
speed of the electromagnetic wave in space,
�is the propagation
speed of the electromagnetic wave in space, ![]() �is the receiver clock
error,
�is the receiver clock
error, ![]() �is the satellite clock
error,
�is the satellite clock
error, ![]() �is the initial carries
phase,
�is the initial carries
phase, ![]() �is the ionospheric
delay,
�is the ionospheric
delay, ![]() �is the tropospheric
delay time offset between, and
�is the tropospheric
delay time offset between, and ![]() �is a carrier phase
measurement error due to receiver noise and multipath. Single-difference
(SD) observations are defined as subtraction two carrier phase observations (1)
for two receivers. SD eliminates satellite clock error due to referencing to
the same satellite. When two receivers are simultaneously tracking two
satellites, double-difference (DD) observations can be formed as follows (Garcia et al., 2005; Li, Wu, Zhao & Tian, 2017):
�is a carrier phase
measurement error due to receiver noise and multipath. Single-difference
(SD) observations are defined as subtraction two carrier phase observations (1)
for two receivers. SD eliminates satellite clock error due to referencing to
the same satellite. When two receivers are simultaneously tracking two
satellites, double-difference (DD) observations can be formed as follows (Garcia et al., 2005; Li, Wu, Zhao & Tian, 2017):
![]() ������������������������������������������������ (2)
������������������������������������������������ (2)
where b is
the reference receiver, r is the
rover receiver, s is the reference
satellite and q is the non‑reference
satellite. Receiver clock error is eliminated by differencing between the
simultaneously tracked s and q satellites. In differential
positioning, DD phase observation equations are most commonly used. Linear
combinations of (2) on two frequencies allow us to eliminate ionospheric delay.
The so-called L3 ionosphere‑free
combination (Witchayangkoon,
2000) approach is most
commonly used for precise measurements.
The GLONASS system
uses FDMA technology for the identification of individual satellites, thus DD
observation equations can be written as follows (Dach & Walser,
2013):
![]() ��������������������������������������� (3)
��������������������������������������� (3)
where the ![]() is referred to as a SD bias
term, which destroys the integer nature of DD ambiguities in Equation (3).
Different frequencies and different carrier wavelengths between satellite pairs
are crucial for GLONASS ambiguity resolution. The bias introduced in the DD
scenario is proportional to the initialization bias of SD ambiguities and the
frequency difference between pairs of satellites under consideration. Based on
the above assumptions, the SIGMA strategy can be applied for the purpose of
GLONASS ambiguity resolution.
is referred to as a SD bias
term, which destroys the integer nature of DD ambiguities in Equation (3).
Different frequencies and different carrier wavelengths between satellite pairs
are crucial for GLONASS ambiguity resolution. The bias introduced in the DD
scenario is proportional to the initialization bias of SD ambiguities and the
frequency difference between pairs of satellites under consideration. Based on
the above assumptions, the SIGMA strategy can be applied for the purpose of
GLONASS ambiguity resolution.
Static measurements
are mostly used when the most-accurate elaborations are needed, such as
landslide movements (Komac, Holley,
Mahapatra, van der Marel & Bavec, 2015) and crustal deformation
monitoring (Rajner &
Liwosz, 2011). Research shows
that integrated hybrid GNSS positioning allows us to achieve accuracy that is
better than GPS-only accuracy in any case (Naesset, Bjerke,
Bvstedal & Ryan, 2000), or during part of
a survey (Przestrzelski,
Baku�a & Galas, 2016). On the other
hand, as Alcay and Yigit
(2016) reported, 24 h
sessions and <30� elevation cut-off angles in GPS-only and GPS/GLONASS
solutions produce the same results. Only for 40� cut-off angles and 4 h
observation sessions do GPS/GLONASS observations improve accuracy, compared to
GPS-only, although these authors did not analyse GLONASS‑only solutions (Alcay & Yigit,
2016). For daily
observations, due to the current state of available software, GPS results tend
to be slightly better than GLONASS results (Zheng et al.,
2012). On the other
hand, RTK measurements show that hybrid GNSS is slightly more accurate than GPS
(Roh, Seo &
Lee, 2003).
3.
METHODOLOGY
The research object involved daily observations on three permanent EPN
stations, i.e., ZYWI (�ywiec, Poland), KRA1 (Krak�w, Poland) and WROC (Wroc�aw,
Poland) between 1 January and 31 March (1-90 DOY). The baselines were 67 km and
220 km long, although ZYWI was a reference station whose coordinates at the
observation epoch, which were obtained by the daily EPN solution, were fixed.
The elaboration was made using Bernese GNSS Version 5.2 algorithms for daily
observations with 30 s sampling intervals (Figure 2). The author modificated
the algorithms to prepare three different scenarios: GPS, GLONAS and GNSS.� Daily DD solutions were made in GPS-only,
GLONASS‑only and hybrid GNSS (GPS+GLONASS) modes using precise IGS final
products on frequencies L1 and L2.
![]()
![]()
![]()
![]()
 ���
���  ��������������
��������������  ���
��� 
![]()
![]()
 ���������������������������������������������
��������������������������������������������� 
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Fig. 2. Diagram of processing using
Bernese GNSS software
During elaboration, the ambiguity resolution strategy was
quasi-ionosphere-free (QIF), while global ionosphere models obtained from IGS
processing at CODE were used. The tropospheric effects were modelled using the
Vienna Mapping Function (VMF1) with no estimation of the horizontal troposphere
gradient, due to single baselines being processed (Dach & Walser, 2013).
During data cleaning, the cut-off elevation angle was set to values presented
in Table 1. Ionosphere effects were modelled applying the L3 ionosphere-free
combination. Solutions were also divided into four different minimal elevation
cut-off angles (Table 1).
Tab. 1
Sky visibility
related to the cut-off angle
|
Cut-off
angle |
0� |
3� |
10� |
30� |
40� |
|
Sky
visibility |
100% |
93.4% |
79.0% |
44.4% |
30.9% |
The two biggest
minimal elevation cut-off angles, 30� and 40�, cover most of the visible sky,
i.e., 55% and 69%, respectively. As relative positioning was based on
simultaneously tracked satellites by the rover and the reference station,
the percentage number of tracked visible satellites is, in practice, always
lower due to the distance between stations. Sky visibility percentages, in
relation to minimal elevation cut‑off angles, is presented in
Table 1. Result coordinates are subtracted from the corresponding final
daily EPN coordinates at the observation epoch and transformed into a
topocentric NEU frame. For statistical analysis purposes, mean absolute
residuals and their standard deviations in the NEU coordinates were calculated.
Tab. 2
Mean
number of visible satellites for all analysed days
|
Cut-off angle |
3� |
10� |
30� |
40� |
||||||||
|
System |
GPS |
GLO |
GNSS |
GPS |
GLO |
GNSS |
GPS |
GLO |
GNSS |
GPS |
GLO |
GNSS |
|
KRA1 |
11.0 |
9.3 |
20.2 |
9.5 |
8.0 |
17.1 |
5.2 |
4.4 |
9.9 |
4.2 |
3.4 |
7.5 |
|
WROC |
10.9 |
9.1 |
20.3 |
9.2 |
7.7 |
16.6 |
5.0 |
4.4 |
9.7 |
3.9 |
3.2 |
7.3 |
Table 2 presents
the mean values for the number of visible satellites during the analysed 90-day
period at both stations. The distance between them is 230 km, meaning that the
visible constellation is very similar.
4.
RESULTS
Figure 3 presents the vertical
coordinate residuals for each baseline and elevation cut-off angle. In two
cases, the smallest cut-off angles� horizontal coordinates are determined with
millimetre accuracy for both baselines. There are also no significant
deviations between each GPS-only, GLONASS-only and GNSS solution. For 30� and
40� cut‑off angles, errors are clearly visible alongside the baseline
direction, and bigger for the longer baseline (ZYWI-WROC). For those cut-off
angles that slightly stand out, GLONASS-only results are the least accurate.
Figure 4 represents the residuals
of the up component. The vertical component, due to the space segment
construction, clock errors, tropospheric delay, multipath and antenna PCV, is
two to three times less accurate than in the case of the horizontal coordinates
(Yeh, Hwang, Xu, Wang & Lee, 2009). As is true for the horizontal coordinates, the most
accurate are the two minimal cut-off angles, which is due to fact that the
biggest number of available signals and eliminated satellites is found on the
lowest elevation. Almost all residuals have a 1-2 cm accuracy. For the 30�
minimal elevation cut-off angle, the up component is determined with a 3-4 cm
accuracy (40�>5 cm accuracy). In each case, GLONASS‑only results are
slightly less accurate, while GPS-only and GNSS results are similar to each
other.
Table 3 presents
the mean absolute residuals (mN, mE, mU) and
standard deviations (σN, σE, σU)
of all analysed coordinate time series. For each solution (cut-off
angle-related and system‑related), the smallest residuals and
standard deviations are shown in bold in Table 2. For both baselines, the
smaller cut‑off angle provides the better accuracy for horizontal
components only. Results are strongly dependent on the length of the processed
baselines, due to the number of simultaneously tracked satellites. This number
decreases as the distance between stations increases.
Fig. 3.
North-east residuals of analysed baselines
Fig. 4. Up
component residuals of analysed baselines
Tab. 3
Mean
absolute residuals and standard deviations of NEU components [mm]
|
Cut-off angle |
3� |
10� |
30� |
40� |
|||||||||
|
System |
GPS |
GLO |
GNSS |
GPS |
GLO |
GNSS |
GPS |
GLO |
GNSS |
GPS |
GLO |
GNSS |
|
|
KRA1 |
mN σN |
1.3 1.1 |
1.3 1.1 |
1.3 1.1 |
1.5 1.3 |
1.5 1.3 |
1.4 1.1 |
2.6 2.3 |
2.6 2.6 |
2.5 2.0 |
4.9 3.7 |
4.5 4.5 |
4.6 3.7 |
|
mE σE |
1.3 0.8 |
2.2 1.8 |
1.3 0.8 |
1.5 0.9 |
2.4 1.6 |
1.5 0.9 |
2.1 2.5 |
3.6 3.8 |
1.8 2.2 |
1.4 3.7 |
7.5 6.1 |
3.7 3.5 |
|
|
mU σU |
10.5 4.7 |
11.4 5.0 |
10.4 4.7 |
6.5 4.2 |
7.5 4.3 |
6.2 4.3 |
8.6 7.1 |
8.6 6.5 |
8.3 7.3 |
17.5 11.9 |
14.2 14.3 |
14.0 12.4 |
|
|
WROC |
mN σN |
0.9 0.7 |
1.0 0.7 |
0.9 0.7 |
1.3 1.0 |
1.4 1.1 |
1.3 1.0 |
7.4 6.8 |
8.2 7.2 |
8.6 6.9 |
4.1 9.2 |
10.0 10.9 |
9.6 8.8 |
|
mE σE |
1.0 0.8 |
1.1 0.9 |
1.1 0.8 |
1.0 1.2 |
1.1 1.2 |
1.1 1.2 |
5.7 6.4 |
6.4 6.9 |
6.6 6.4 |
6.6 9.5 |
11.2 12.0 |
9.6 9.5 |
|
|
mU σU |
8.2 4.4 |
8.4 4.5 |
8.2 4.3 |
6.0 4.2 |
6.3 4.3 |
5.9 4.0 |
23.7 10.0 |
22.3 10.6 |
22.9 10.2 |
22.5 15.7 |
22.5 15.0 |
23.8 16.1 |
|
In case of the up
component, this is more precisely determined for the 10� cut-off angle than for
3�. For two minimal cut‑off angles, the north and east components are
calculated with a 0.7‑1.1 mm and 0.8-1.8 mm accuracy, respectively.
For the up component, the accuracy is between 4.2 and 5.0 mm. There are also no
significant differences between the GPS-only, GLONASS-only and GNSS results. In
the case of the 30� elevation cut‑off angle, the horizontal
components for each solution are two to six times worse than the 3� and 10�
cut-off angles (e.g., WROC station, east component). Note that, for the three
smallest elevation cut-off angles, the solutions (GPS-only, GLONASS-only and
GNSS) are generally similar. For the 40� cut-off angle, the GLONASS results are
the worst. Comparing the GPS and hybrid GNSS results shows that they are at the
same level, while, for the ZYWI-WROC baseline, the GPS-only results are
even better than those for GNSS.
5.
SUMMARY
This study presented a comparison of GPS-only, GLONASS-only
and hybrid GNSS solutions for 24 h observations with 30 s sampling intervals,
according to the elevation cut‑off angle. The research referred to 90
consecutive observations on two baselines with relative positioning, with the
use of Bernese GNSS Version 5.2 software. The resulting coordinates were
compared with corresponding daily EPN solutions. This work was carried out in
order to check the practical benefits of adding GLONASS signals to an existing
GPS involving obstacles. For the three smallest elevation cut-off angles, there
were no significant differences between each solution (GPS-only, GLONASS-only,
GNSS). It was demonstrated that GLONASS-only solutions can be comparable to the
others, albeit only for small elevation cut-off angles; for the greatest
elevation cut-off angle, these types of solutions result in differences,
especially for horizontal components. A hybrid GNSS solution also revealed
insignificant benefits compared to the GPS-only approach. For each elevation
cut‑off angle, GPS-only and hybrid GNSS results had the same accuracy
level. GLONASS observation results were less accurate than for GPS, probably
due to the algorithms used in the software. In the case of big cut-off angles,
more satellites did not produce more accurate coordinates when using two GNSS
systems. The results presented in this study do not validate the contributions
and advantages of adding GLONASS to GPS‑only observations in obstructed
sky view areas and 24 h observation sessions.
Acknowledgements
�
This paper was prepared within the
scope of the AGH University of Science and Technology�s statutory research
projects, 11.11.150.444 and 15.11.150.397.
References
1.
Alcay S., C. Inal, C. Yigit, M. Yetkin. 2012.
�Comparing GLONASS-only with GPS-only and hybrid positioning in various length
of baselines�. Acta Geodaetica et
Geophysica Hungarica 47(1): 1-12. DOI:
https://doi.org/10.1556/AGeod.47.2012.1.1
2.
Alcay S., C.O.
Yigit. 2016. �Network based performance of GPS-only and combined GPS/GLONASS
positioning under different sky view conditions�. Acta Geodaetica et Geophysica. DOI:
https://doi.org/10.1007/s40328-016-0173-5.
3.
Angrisano A., S.
Gaglione, C. Gioia. 2013. �Performance assessment of GPS/GLONASS single point
positioning in an urban environment�. Acta
Geodaetica et Geophysica 48(2): 149-161. DOI:
https://doi.org/10.1007/s40328-012-0010-4.
4.
Cai C., Y. Gao.
2012. �Modeling and assessment of combined GPS/GLONASS precise point
positioning�. GPS Solutions 17(2):
223-236. DOI: https://doi.org/10.1007/s10291-012-0273-9.
5.
Charles J. 2010. An Introduction to GNSS. NovAtel Inc.
6.
Dach R., P.
Walser. 2013. Bernese GNSS Software Version 5.2.
7.
Garcia J.G., P.I.
Mercader, C.H. Muravchik. 2005. �Use of carrier phase double differences�. Latino American Applied Research 35: 115-120.
8.
Guo F., X. Li, X.
Zhang, J. Wang. 2017. �Assessment of precise orbit and clock products for
Galileo, BeiDou, and QZSS from IGS Multi-GNSS Experiment (MGEX)�. GPS Solutions 21(1): 279-290. DOI:
https://doi.org/10.1007/s10291-016-0523-3.
9.
Hofmann-Wellenhof
B., H. Lichtenegger, E. Wasle. 2008. GNSS
� Global Navigation Satellite Systems. Vienna: Springer Vienna. DOI:
https://doi.org/10.1007/978-3-211-73017-1.
10.
Kaplan E., C.
Hegarty. 1997. Understanding GPS. Norwood,
MA: Artech House.
11.
Kleusberg A. 1990.
�Comparing GPS and GLONASS�. GPS World
1(6): 52-54.
12.
Komac M., R.
Holley, P. Mahapatra, H. van der Marel, M. Bavec. 2015. �Coupling of GPS/GNSS
and radar interferometric data for a 3D surface displacement monitoring of
landslides�. Landslides 12(2):
241-257. DOI: https://doi.org/10.1007/s10346-014-0482-0.
13.
Li G., J. Wu, C.
Zhao, Y. Tian. 2017. �Double differencing within GNSS constellations�. GPS Solutions. DOI:
https://doi.org/10.1007/s10291-017-0599-4.
14.
Naesset E., T.
Bjerke, O. Bvstedal, L. Ryan. 2000. �Contributions of differential GPS and
GLONASS observations to point accuracy under forest canopies�. Photogrammetric Engineering & Remote
Sensing: 403-407.
15.
Przestrzelski P.,
M. Baku�a, R. Galas. 2016. �The integrated use of GPS/GLONASS observations in
network code differential positioning�. GPS
Solutions: 1-12. DOI: https://doi.org/10.1007/s10291-016-0552-y.
16.
Rajner M., T.
Liwosz. 2011. �Studies of crustal deformation due to hydrological loading on
GPS height estimates�. Geodesy and
Cartography 60(2): 135-144. DOI: https://doi.org/10.2478/v10277-012-0012-y.
17.
Roh T.H., D.J.
Seo, J.C. Lee. 2003. �An accuracy analysis for horizontal alignment of road by
the kinematic GPS/GLONASS combination�. KSCE
Journal of Civil Engineering 7(1): 73-79. DOI:
https://doi.org/10.1007/BF02841990.
18.
Schmid R., M.
Rothacher, D. Thaller, P. Steigenberger. 2005. �Absolute phase center
corrections of satellite and receiver antennas�. GPS Solutions 9(4): 283-293. DOI:
https://doi.org/10.1007/s10291-005-0134-x.
19.
S�derholm S.,
M.Z.H. Bhuiyan, S. Thombre, L. Ruotsalainen, H. Kuusniemi. 2016.
�A multi-GNSS software-defined receiver: design, implementation, and
performance benefits�. Annals of Telecommunications
71(7-8): 399-410. DOI: https://doi.org/10.1007/s12243-016-0518-7.
20.
Witchayangkoon B.
2000. Elements of GPS Precise Point
Positioning. PhD thesis.
21.
Xu G. 2003. GPS: Theory, Algorithms and Applications.
Berlin, Heidelberg, New York: Springer.
22.
Yeh T.K., C.
Hwang, G. Xu, C.S. Wang, C.C. Lee. 2009. �Determination of global positioning
system (GPS) receiver clock errors: impact on positioning accuracy�. Measurement Science and Technology
20(7): 75-105. DOI: https://doi.org/10.1088/0957-0233/20/7/075105
23.
Yongjun Z. 2002.
�Combined GPS/GLONASS data processing�. Geo-spatial
Information Science 5(4): 32-36. DOI: https://doi.org/10.1007/BF02826472.
24.
Zheng Y., G. Nie,
R. Fang, Q. Yin, W. Yi, J. Liu. 2012. �Investigation of GLONASS performance in
differential positioning�. Earth Science
Informatics 5(3-4): 189-199. DOI: https://doi.org/10.1007/s12145-012-0108-9
Received 04.10.2017; accepted in revised form 05.01.2018
![]()
Scientific Journal of
Silesian University of Technology. Series Transport is licensed under
a Creative Commons Attribution 4.0 International License