Article citation information:
Kirci, P., Saglamoz, S., Sener, M. An intelligent vehicle detection management model for parking spaces. Scientific Journal of Silesian University of Technology. Series Transport. 2018, 98, 35-43. ISSN: 0209-3324. DOI: https://doi.org/10.20858/sjsutst.2018.98.4.
Pinar KIRCI[1],
Selen SAGLAMOZ[2],
Murat SENER2
AN
INTELLIGENT VEHICLE DETECTION MANAGEMENT MODEL FOR PARKING SPACES
Summary. Today, technology has transformed humans’ lives in all
areas. Technology can be found in everyday life in the form of smart factories,
smart cities and smart rooms. Thus, smart systems and devices are having a
great effect upon human activities. Together with improving technology, in the
last 50 years, the human population has seen an expeditious and substantial
increase. The number of cars has also substantially increased and, as a result,
parking spaces and car park have become more important. Areas in which to park
cars have become wider in scope, including inside huge buildings; thus, the management
of them become more difficult and complicated. Being able to discover an empty
parking space as soon as it is needed is vital for both driver and multilevel
parking garage owner, especially for the former, in order to avoid losing
him/her time and money in a crowded city. Thus, we designed a smart car parking
system, which is managed by Arduino control. Our main aim includes reducing
time loss and the amount of fuel consumed while trying to find a parking space.
By reducing the amount of consumed fuel, it will be possible to reduce air
pollution levels, together with minimizing the negative impact on domestic
finances caused by car usage.
Keywords: sensors,
wireless networks, parking spaces, cost
1. INTRODUCTION
Major increases in the human population
has caused a corresponding augmentation in the number of cars. Thus, parking
spaces and car parks have become more important. In the past, employees served
customers by controlling the entrance and exit of cars. But, today, areas to
park cars are becoming wider in scope include the insides of huge buildings.
Thus, the management of such areas has become more difficult and complicated.
Being able to discover an empty space as soon as it is needed is crucial state
for driver and multilevel parking garage owner. Finding a parking space in a
short time is particularly important for the driver, so as to avoid losing
him/her time and money in a crowded city.
It can be quite frustrating for a
driver to go around a car park looking for a space. If the driver cannot find
one, then s/he has to leave the multilevel parking garage and find another. In
response this situation, we designed a smart car parking system. Our project is
composed of three basic system applications, namely, automatic car parking
barriers, empty/occupied place sensing, and monitoring. The presented smart car
parking system is managed by Arduino control, in which users can find an
available parking space via their smartphone.
Of late, increasing energy costs,
the need for greater efficiency, competition and developing technologies have
prompted the emergence of smart car parking systems. Inspired by customer
needs, at first, automatic barrier systems and warning systems for occupied
parking spaces were produced. Thus, people have noticed that, by utilizing
these types of systems, daily processes in multilevel parking garage have
become simpler.
Intelligent transportation systems
with vehicular ad hoc networks (VANETs) have been widely studied, as they
include many useful specialities and ease road transportation by utilizing
prior alerts about traffic conditions, automatic parking and collision
determination warnings [1,2]. In [3], a model was improved for characterizing
parking location decisions of individual trip makers to provide data concerning
the impacts of alternative parking policies on such decisions in an urban area.
A microsimulation approach was utilized in [4] to capture the adaptation of
individuals’ travel patterns to policies. Land use and transport in the city of
Rotterdam were examined by illustrating hypothetical scenarios. A new model has
been presented for modelling private vehicle ownership in India [5]. Variable
behaviours between men and women in responding to traffic information was
studied in [6], which also considered advanced in-vehicle systems in order to
deal with congestion. Driving range limits and alternative travel cost compositions
were considered in [7], together with route and parking choices. Park-and-ride
stations, bus rapid transit schedules and parking spaces were considered in [8],
in which a linear integer programming model was used to formulate the capacity
of parking spaces, alongside a network design problem.
The progressive occupancy of parking
capacity on the street was examined in [9] within the paradigm of user
equilibrium. Kerb parking involving dynamic traffic was studied in [10], along
with the formulation of traffic management measures for providing traffic
safety. To predict occupancy at the destination, a real-time occupancy model
was presented in [11]. Meanwhile, traffic seeking parking spaces can be found
in the inner districts of towns because of a deficiency in reliable data on the
fullness rates of on-street parking places. A real-time occupancy model was
proposed to predict occupancy at the destination. In this paper, traffic flow
volumes were considered with regard to a number of car parks. A street parking
occupancy detection system, based on video, was proposed in [12]. Many
challenges were taken into consideration when designing this system, such as
rain, occlusions and illumination changes in motion and vehicle detection, by
using computer vision and video processing. In the future, we can expect to
consider the implementation of artificial intelligence methods, which are
already widely used in various tasks, including image analysis [13-16].
2. SYSTEM OVERVIEW
In our evolving and varying world,
technology is improving and supporting our lives in all areas. Today,
technology is found in every part of daily life with smartphones, smart cars,
smart homes and smart clocks. Thus, these smart systems and devices play a
major role part in humans’ lifetime. To be defined as smart, the program or
system should have some of the characteristics below:
·
Making decisions
·
Sensing
·
Learning
·
Problem-solving
·
Reasoning
·
Figure or picture
recognition
·
Natural language
understanding
The capacity to perform different
jobs and applications simultaneously makes smart systems indispensable. Smart
portable systems can achieve almost all of the applications that are provided
by a stationary computer system.
Responding to the main requirements
of customers in a car park, we have considered an automatic barrier system,
empty/occupied area sensing and monitoring. The proposed system is composed of
an Arduino Mega 2560, which is an ATmega2560 base circuit board. It is
programmed over Arduino IDE. To detect empty parking spaces, CNY 70 konstrat
sensors are used. We decided to use Bluetooth over Wi-Fi and NFC communication
systems.
In our project, the user starts to
use the application by activating Bluetooth via a connection to the HC-06
Bluetooth module. To provide the connection between the MAC address of the
user’s device and the device itself, a socket is formed, with received data
processed together along with sending data to Arduino. The Firebase RealTime
Database is also utilized on the project, which allows us to stored project
data as JSON in real time.
3. PROPOSED SYSTEM IMPLEMENTATIONS
In the last 20 years, increasing
energy costs, the need for greater efficiency, competition and developing
technologies have led to the emergence of and improvements in smart car parking
systems in line with customer needs.
For this reason, we considered the
main needs of customers in terms of parking spaces: an automatic barrier
system, empty/occupied area sensing, and monitoring. On the project, we
designed a system for two types of users. If the user has already reached the
car park, s/he will be informed at the entrance of the available spaces. But,
if the user is on the way to the car park, s/he will be informed via our system
over his/her smartphone before arriving about the fullness rate.


(a)
(b)
Fig. 1.
User interface of the presented car parking system (a) and location of the
closest parking space (b)
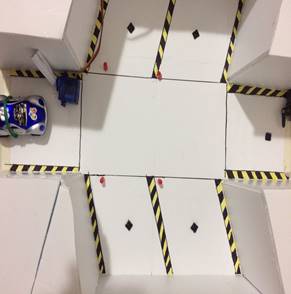
On the project, we designed four
parking areas, each one containing four parking spaces. In each area, empty
parking spaces are monitored with sensors, which are placed in the parking
space at floor level. The number of empty parking spaces is then shown at the
entrance of the car park, meaning that, if there is no empty parking space, the
customer decides to leave, rather than enter the multilevel parking garage.
Thus, the customer saves time and money. When a customer leaves a parking
space, the availability will be noticed by the system; however, until s/he
leaves by the exit, its place will not show as empty in order to prevent a
queue. Thus, at the entrance and exit, possible congestion is prevented.
The user can monitor the parking
area with the presented application as shown in Figure 1a. According to his/her
location, the application will look for the closest parking area in the system.
Then it will examine the fullness rate of the parking area. If it detects that
the parking area is full, it will look for the next closest parking area. When
it notices a suitable one as presented in Figure 1b, the system provides the
user with directions and the fullness rate. If the user does not want to go to
this location, the system will look for another suitable space for the user.
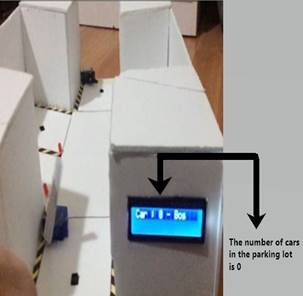
We used an Arduino Mega 2560, which
is an ATmega2560 base circuit board. It is programmed over Arduino IDE. CNY 70
konstrat sensors are utilized to detect the empty parking spaces as shown in
Figure 2a. On our project, when there is no car to trigger the sensors, the
screen displays “Car : 0” to show that the parking space is empty, as shown in
Figure 2b.
When a car reaches the entrance, the
driver is informed about the fullness rate of the parking area in terms of the
number of cars inside. If there is an empty parking space, the screen also
displays “Empty”. In Figure 3, two cars are sensed in the parking area, which
means that there are two empty parking spaces. Thus, an automatic barrier
system opens to allow the waiting car at the entrance to enter the parking
area. The user who monitors the parking system over his/her smartphone will
also receive the information as shown in Figure 3b.
(a)
(b)
Fig. 2.
The presented smart car parking system (a) and the presented smart car parking
system screen (b)


(a) (b)
Fig. 3. The presented car parking system with two cars (a) and the
presented car parking system interface with two cars (b)

(a) (b)
Fig. 4.
The full smart car parking system (a) and
the full smart car parking system interface (b)
The CNY 70 sensor emits infrared
signals and produces analogue outputs according to whether or not infrared
signals are received back. This helps us to decide whether there is a
reflective surface in front of the sensor. If there is a surface in front of
the sensor, this means that there is a car parked in the respective parking
space. Furthermore, at the entrance, the number of occupied parking spaces is
shown as three, while the number of empty parking spaces is shown as one. For
this reason, the automatic barrier is opened for the fourth car to enter into
the parking area in question. When the fourth car enters the parking area, both
the screen as shown in Figure 4a and the smartphone application as shown in
Figure 4b indicate that the parking area is full. In addition, the smartphone
application offers to find the next closest parking area for the user.
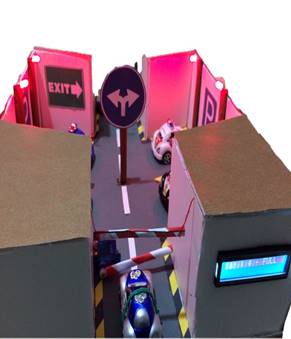
In Figure 5, the sensors that are
triggered by cars are represented by red lights, which are on. The parking area
in this example is full with four cars; thus, the entrance is closed to waiting
cars in order to prevent congestion and queues.
When the parking area is occupied by
four cars, but one of them is leaving, and there is another car arriving at the
entrance at the same time, in order to prevent congestion and queues, the
automatic barrier system will not open until the departing car leaves the
parking area as represented in Figure 6. After this car leaves, the automatic
barrier system opens to allow the arriving car inside the parking area.
Fig. 5. The full smart car parking system
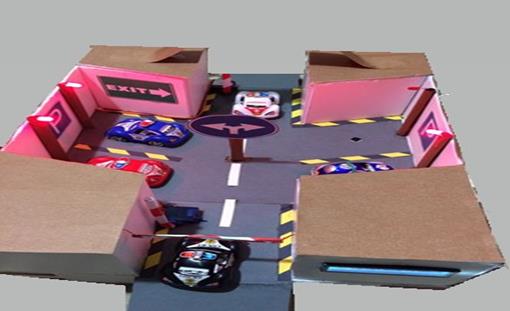
Fig. 6. The full smart car parking system
4. CONCLUSION
We applied sensor technology to
identify parking space availability in our proposed car parking system. In the
presented work, basic methods are used in order to implement this system at the
present time. Our main aim is to minimize both financial and time losses
related to finding a parking space by utilizing sensors. The use of sensors in
this way allows for the collection and processing of data in a short time
period, which in turn will ensure lower costs and less time loss. Utilizing
sensors in industry and factories offers many benefits to people, as well as in
car parks. We also combined sensor usage with the Android platform found in
some smartphones. The user can easily access the presented system with
user-friendly interfaces in order to determine the closest and available spaces
in a car park in a short time. Thus, the user does not waste time and fuel to
look in this search. Future research could develop a system that can be placed
in parking spaces found on the roadside in order to provide users with more
parking space options.
References
1.
Jaiswal
Raj K., C.D. Jaidhar. 2016. “Location prediction algorithm for a nonlinear
vehicular movement in VANET using extended Kalman filter”. Wireless Networks:
1-16.
2.
Silver
S.D. 2017. “Multivariate methodology for discriminating market segments in
urban commuting”. Public Transport.
DOI 10.1007/s12469-017-0169-8.
3.
Gillen
David W. 1978. “Parking policy, parking location decisions and the distribution
of congestion”. Transportation 7(1), 69-85.
4.
Liao
F., T. Arentze, E. Molin, W. Bothe, H. Timmermans. 2017. “Effects of land-use
transport scenarios on travel patterns: a multi-state supernetwork
application”. Transportation 44: 1-25.
5.
Dash
Sarojeet, V. Vasudevan, S. Kumar Singh. 2016. “A piecewise linear multinomial
logit model of private vehicle ownership behaviour of Indian households”. Transportation
in Developing Economies 2: 17.
6.
Baratian-Ghorghi
Fatemeh, H. Zhou. 2015. “Investigating women’s and men’s propensity to use
traffic information in a developing country”. Transportation in Developing
Economies 1: 11-19.
7.
Jiang
N., C. Xie, J.C. Duthie, T.S. Waller. 2014. “A network equilibrium analysis on
destination, route and parking choices with mixed gasoline and electric
vehicular flows”. EURO Journal on
Transportation and Logistics 3: 55-92.
8.
, , , ,, 2016.How many
and where to locate parking lots? A space-time accessibility-maximization
modeling framework for special event traffic management”. Urban Rail Transit 2: 59-70.
9.
Kotelnikova
N., F. Leurent. 2016. “Parking equilibrium along the street.” European
Transport Research Review 8: 24.
10.
Cao
Y., Z.Z. Yang, Z.Y. Zuo. 2017. “The effect of curb parking on road capacity and
traffic safety”. European Transport Research Review 9: 4.
11.
Hössinger
R., P. Widhalm, M. Ulm, K. Heimbuchner, E. Wolf, R. Apel, T. Uhlmann. 2014.
“Development of a real-time model of the occupancy of short-term parking
zones”. International Journal of
Intelligent Transportation Systems Research 12: 37-47.
12.
Bulan
O., R.P. Loce, W. Wu, Y.R. Wang, E.A. Bernal, Z. Fan. 2013. “Video-based
real-time on-street parking occupancy detection system”. Journal of Electronic Imaging 22: DOI: 10.1117/1.JEI.22.4.041109.
13.
Ogiela
L., R. Tadeusiewicz, M. Ogiela. 2006. “Cognitive
analysis in diagnostic DSS-type IT systems”. In Eighth International Conference on Artificial Intelligence and Soft
Computing (ICAISC 2006). 25-29 June 2006. Zakopane, Poland. Book Series: Lecture Notes in Computer Science Vol. 4029: 962-971.
14.
Ogiela
L., R. Tadeusiewicz, M. Ogiela. 2006. “Cognitive
computing in intelligent medical pattern recognition systems”. In D.S. Huang,
K. Li, G.W. Irwin, eds., International
Conference on Intelligent Computing (ICIC). 16 August 2006. Kunming, China.
Book Series: Lecture Notes in Control and Information Sciences Vol. 344:
851-856.
15.
Ogiela M.,
R. Tadeusiewicz, L. Ogiela. 2005. “Intelligent semantic
information retrieval in medical pattern cognitive analysis”. In O. Gervasi,
M.L. Gavrilova, V. Kumar et al., eds., International
Conference on Computational Science and Its Applications (ICCSA 2005) Vol. 4.
9-12 May 2005. Singapore. Book Series:
Lecture Notes in Computer Science
Vol. 3483: 852-857.
16.
Tadeusiewicz
R., L. Ogiela, M. Ogiela. 2008. “The
automatic understanding approach to systems analysis and design”. International Journal of Information
Management 28(1): 38-48.
Received 22.10.2017; accepted in revised form 02.01.2018
![]()
Scientific Journal of
Silesian University of Technology. Series Transport is licensed under
a Creative Commons Attribution 4.0 International License